51单片机
- 相关链接
- Cx51编译器 用户指南 可理解为C语言的额外修改版本
- Keil 官网 Keil下载后需找渠道激活
- STC-ISP 下载链接
基础知识
- 开发工具:keil5 编写程序、STC-ISP 下载程序、烧录软件-找厂商要
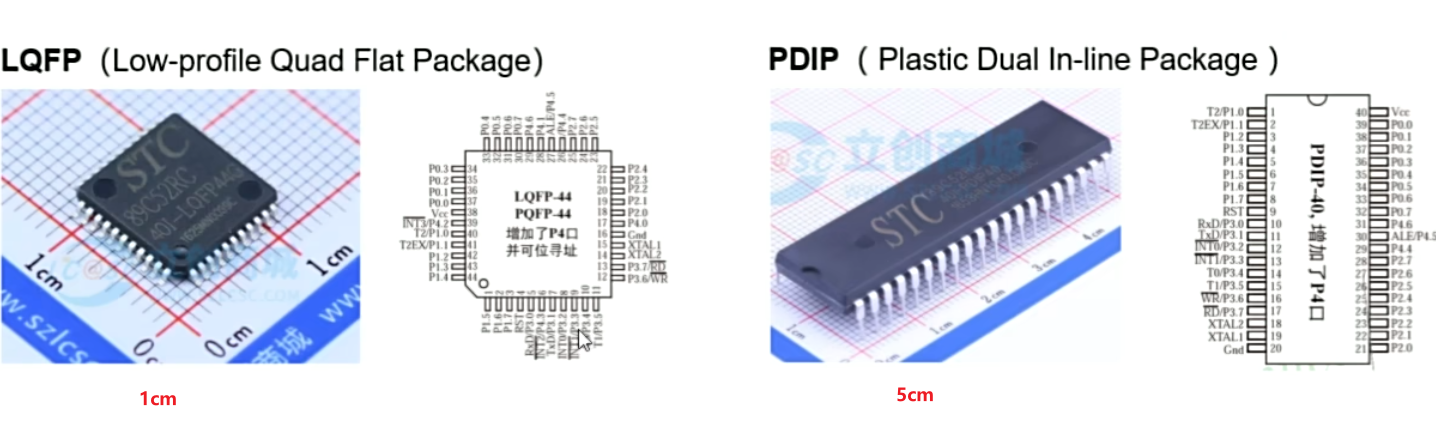
- 说明:本文档基于 STC89C52 单片机
51单片机
- 单片机、简称 MCU
- 将CPU、存储器【RAM、ROM】、输出输出、定时器、中断系统、通讯接口等集成在一个芯片上的微型计算机。成本低、体积小、结构简单、易于编程。
- 单片机的任务是:信息采集(依靠传感器)、处理(依靠CPU)、控制(电机、LED等)
- 51单片机指所有 兼容Inter 8031指令系统的单片机的统称。 实现8051指令集?
STC89C52
- 位数:8位单片机;寄存器、数据总线、计算逻辑单元等也都是8位,一次能处理8位数据。
- RAM:512字节 - 掉电丢失
- ROM:8kb(Flash)- 掉电不丢失 1k=1024b 1b=8字节
- 工作频率/速度:不同板子不一定相同(单片机晶振决定?)
- 命名规则:



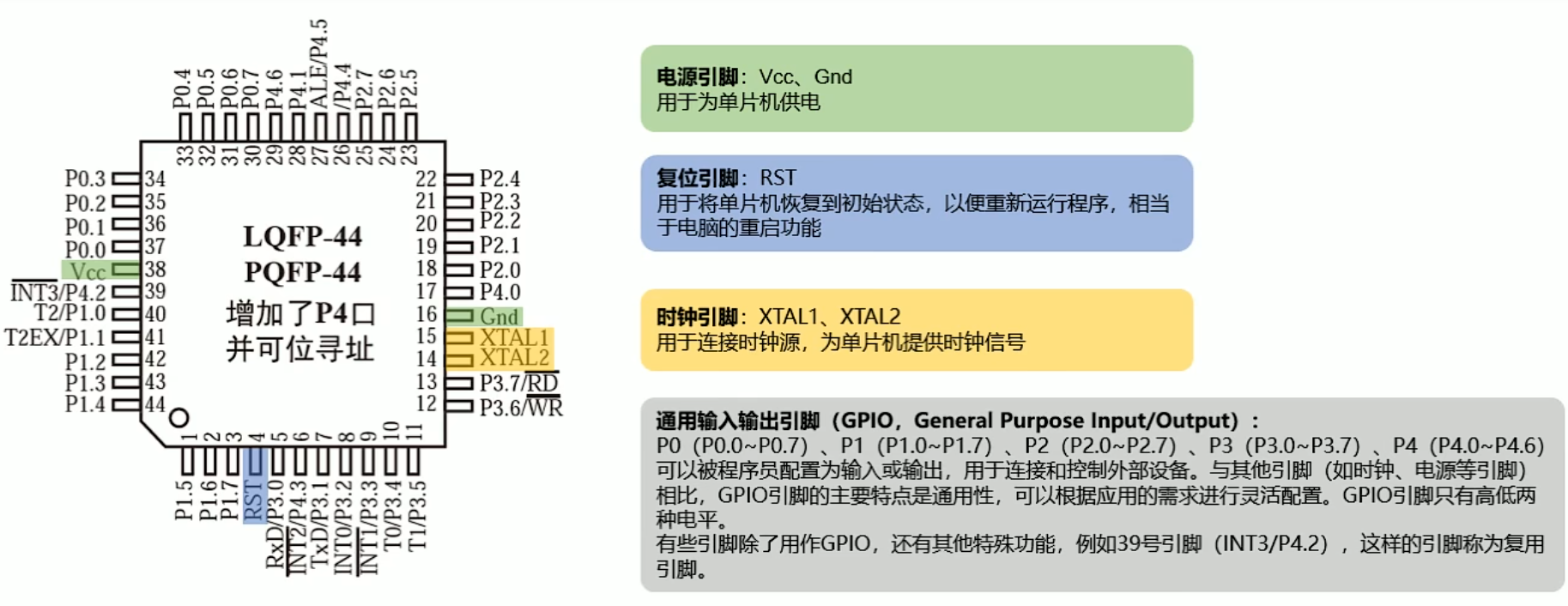
引脚
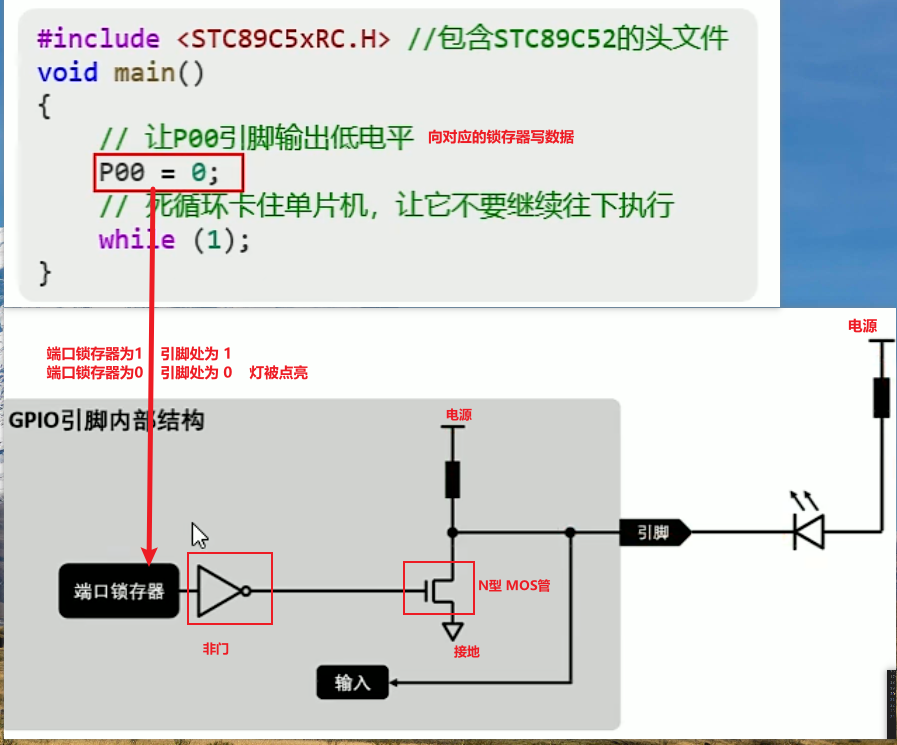
- 在单片机中有寄存器(存储器)、且8个为一组、每个寄存器都通过一个驱动器(驱动增大电流)连接一个IO口
- CPU可以直接访问并控制寄存器中的值,从而控制IO的输出
- 通过CPU控制寄存器、完成对硬件电路的控制
- 在51中一般使用16进制进行控制
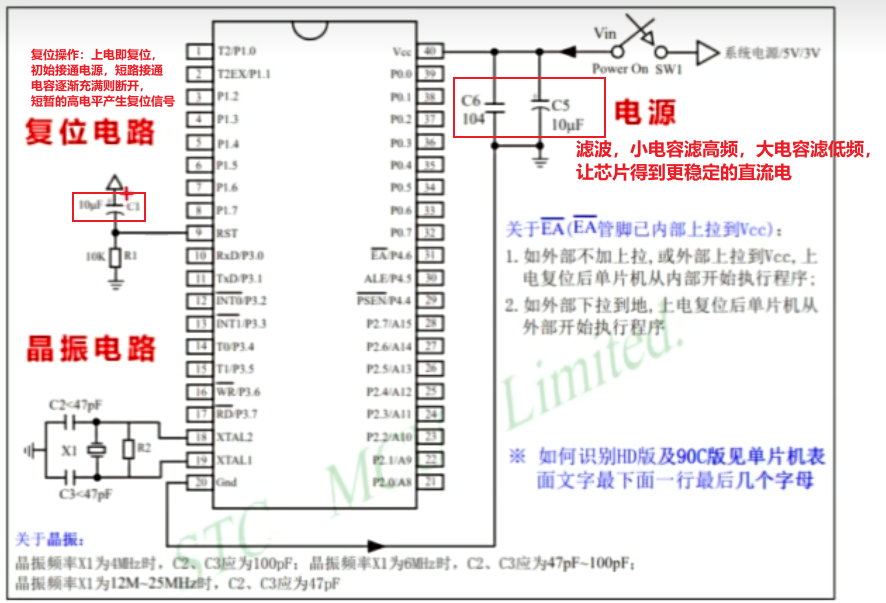
最小系统
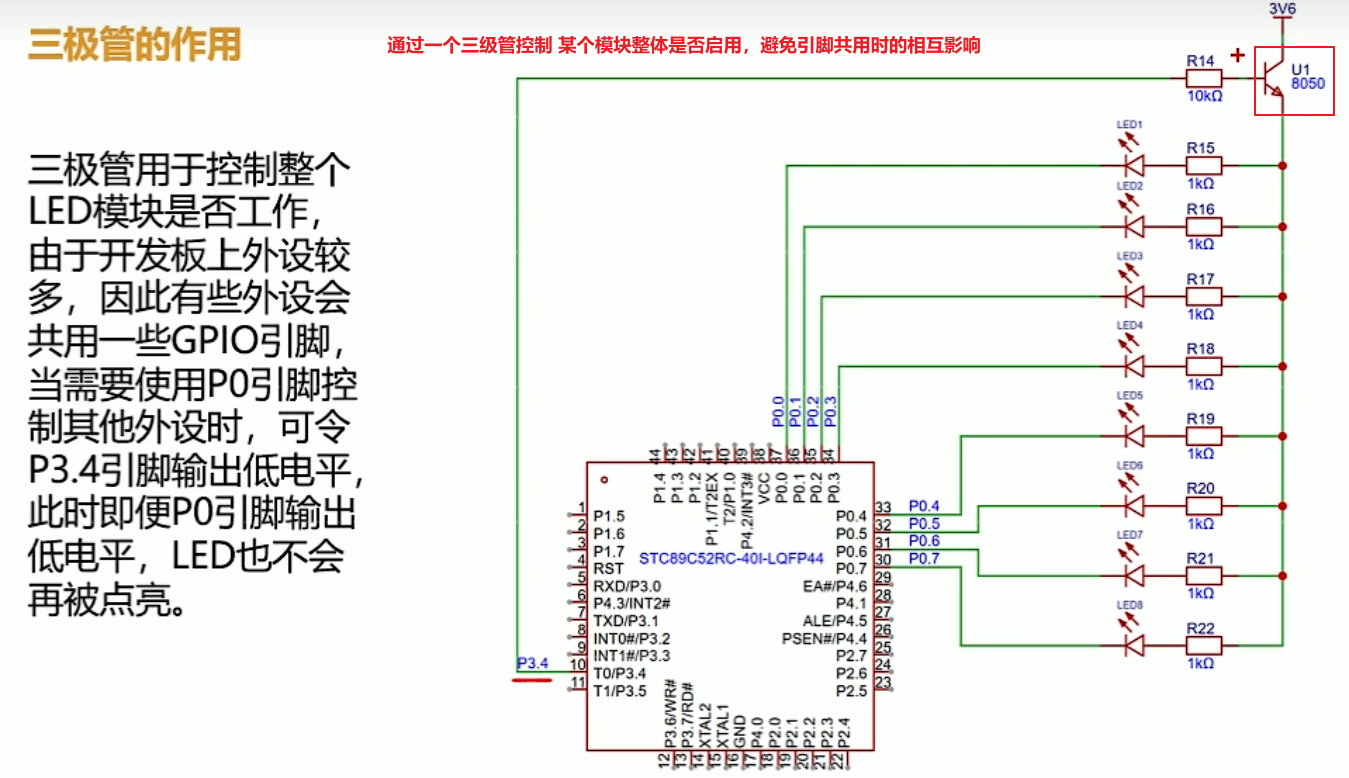
三级管
逻辑分析仪
软件准备
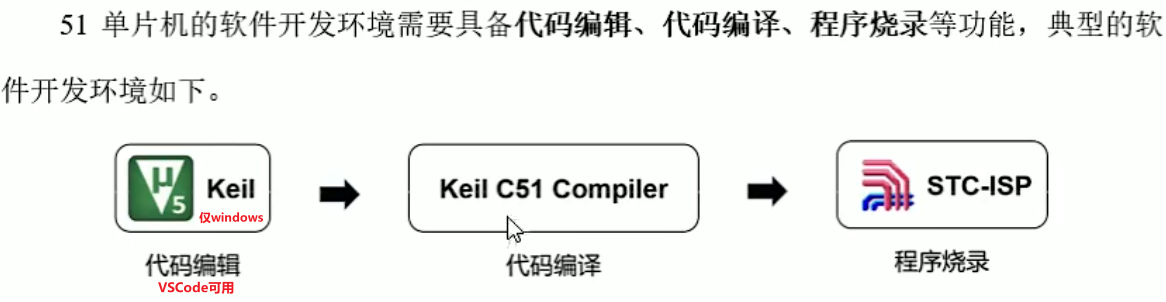
STC89C52支持
- 下载并激活keil【略】
- 下载STC-ISP
- 配置STC-ISP【将我们的芯片database 导入到 keil 】
- 关闭 keil
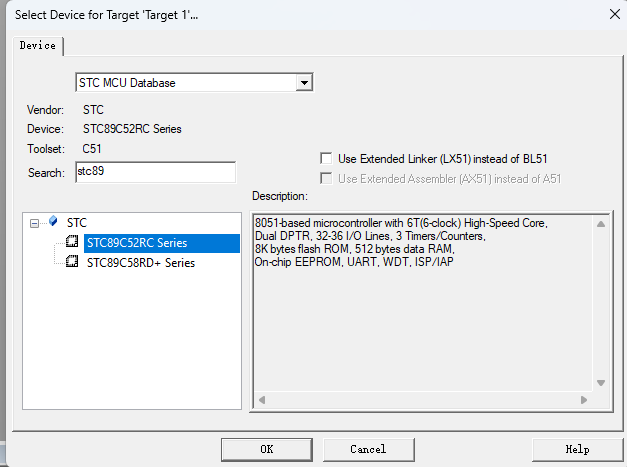
- 坐上角 芯片型号 - 选择 STC89C52/LE52RC
- 右上 keil仿真设置 - 选择 “添加型号和头文件到keil中...”
- 弹出框中选择keil安装路径
- 使用 keil 创建项目
- Poject - new Poject - 设置存放的目录
- 选择使用的芯片,下图例:
STC89C52RC - 确定添加启动文件
- 在单片机复位时执行,清除数据+初始化操作
中文乱码解决
- Edit - Configuration - Encoding - 选择支持中文的字符集即可 GB2312
- 如果报错,可能是没有修改的权限,需用管理员身份运行
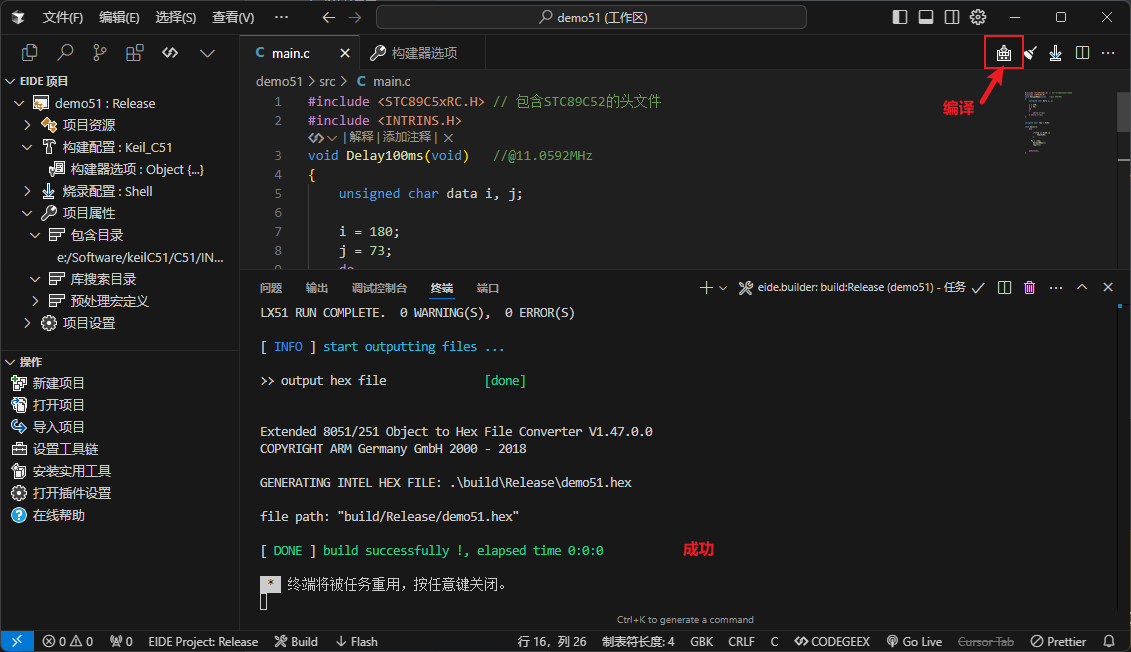
编译配置(魔法棒)
- Output
- 勾选 Create HEX File , 生成HEX文件
编译
- 左上角编译按钮 3个
- 只编译当前文件,不会触及其他文件的链接【用于检查当前文件】
- 差量化编译, 编译当前Target目录下修改过的所有文件,产生链接【生成可执行文件】
- 完全重新编译,【生成可执行文件】
- 注意
- 能被开发板识别的可执行文件为 hex 后缀
- 编译后的文件可通过,项目文件夹 - Objects 文件夹下查看
demo
- 使用kile5新建项目
- 第一步:设置项目名及保存的路径
- 第二步:配置·单片机型号;stc89c52
- 第三步:新建main.c,开写
#include <REGX52.H>
void main(){
P2 = 0xFE; // 设置P2组的引脚值,控制高低电平 1111 1110
}
#include <STC89C5xRC.H> // 包含STC89C52的头文件
void main(){
P00 = 0; // 让P00引脚输出低电平
while(1); // 死循环,让程序持续运行,从而使单片机持续工作
}
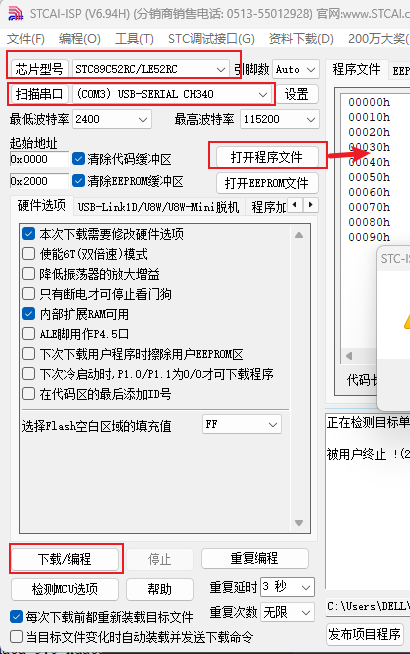
代码烧录
- 核心板默认不支持USB协议进行数据传输,支持传统串口协议
- 在开核心板上,存在 CH340 芯片,实现 USB转串口 的协议
- 注意
- windows可能需要安装 CH340驱动
使用VSCode
- Embedded IDE 官方文档
- VSCode 插件,用来开发单片机项目,比如:
8051,stm8,stm32,other cortex-m mcus...
- VSCode 插件,用来开发单片机项目,比如:
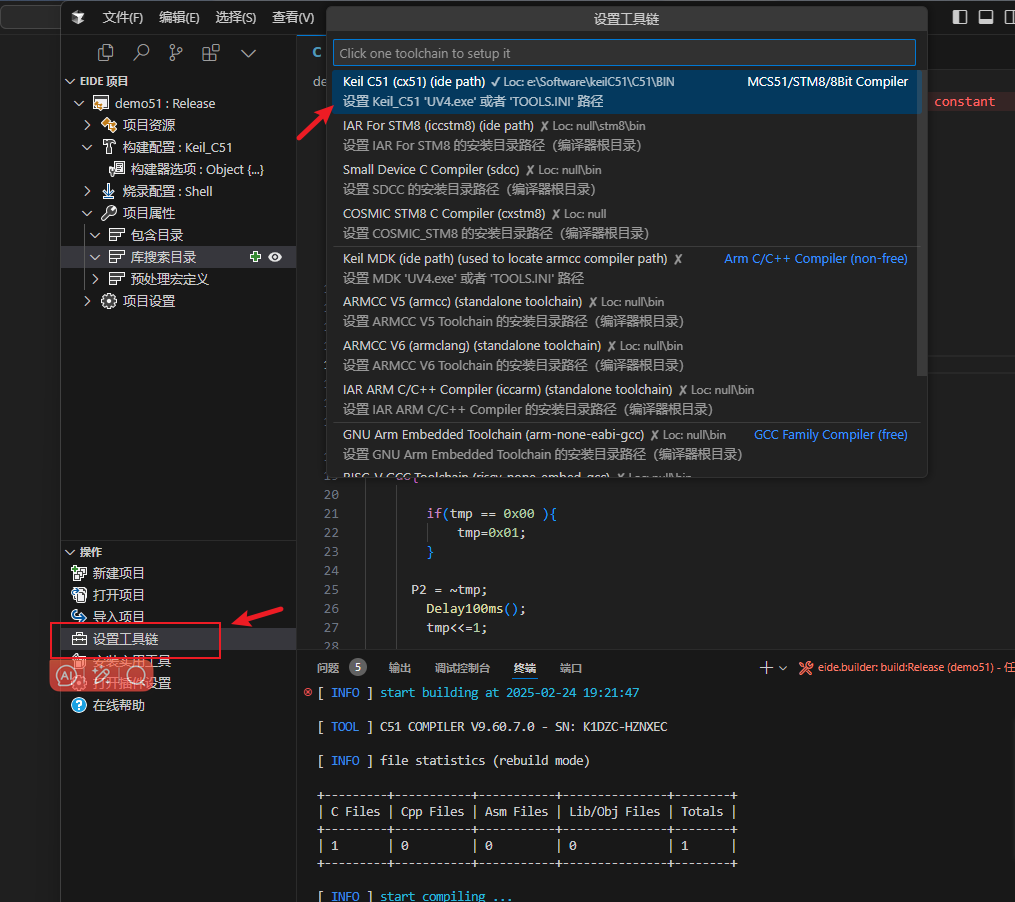
- 使用步骤
- 安装插件
- 创建项目- 空项目-根据需要选择
- 打开项目-并切换为工作区
- 插件配置 - 设置工具链 - 配置相关工具的路径
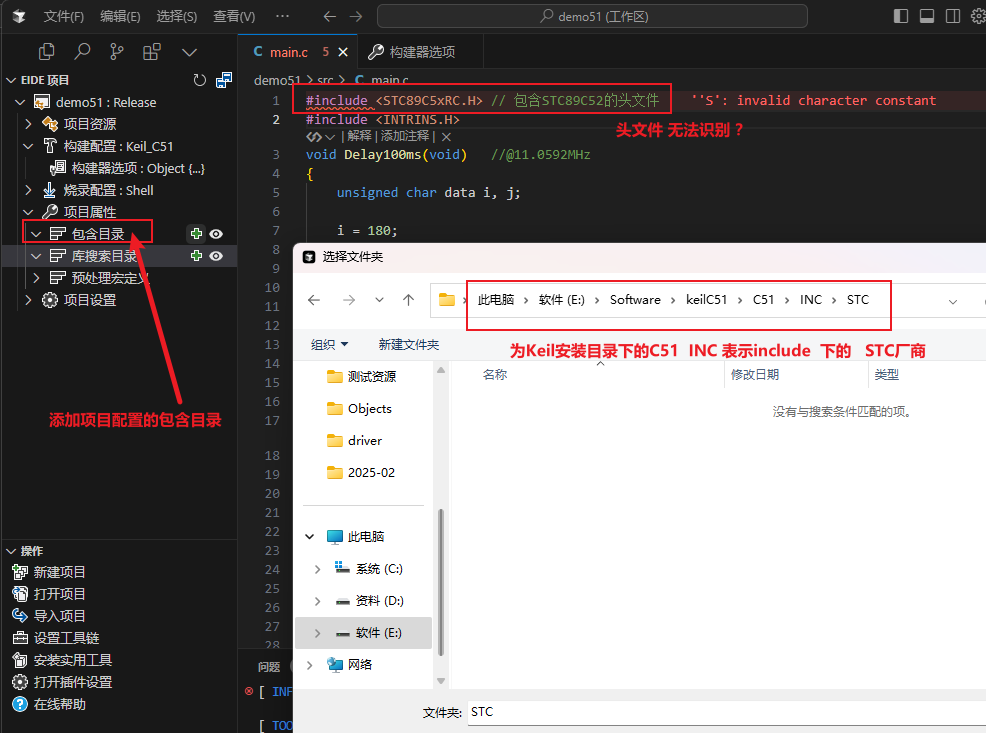
- 插件配置 - 项目属性 - 包含目录 - 引入相关INC目录
- 编译代码 - 成功后就可以使用【后续使用STC-ISP烧录】
- VSCODE中需要安装 python,借助 py脚本实现
知识点
头文件
头文件重复处理
- 同一份头文件可能被不同文件引用,避免重复被执行,应使用
#ifndef #define #endif做处理
#ifndef 模块名称
#define 模块名称
// .h 头定义内容...
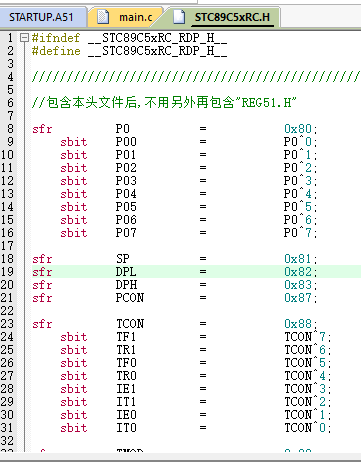
#endifSTC89C5xRC.H
包含STC89C52的头文件,keil 代码中 鼠标右键 open document xxx 查看具体内容
- sfr(Special Function Register)
- keil C51编译器提供的扩展数据类型,用于声明单片机中的特殊功能寄存器
- 特殊功能寄存器:用于控制、配置单片机中的各种硬件设备,如GPIO端口、定时器、串口等
- 每组GPIO端口均有一个对应的8为寄存器
- P0 的
0x80表示第0组的寄存器地址,不能修改,可通过单片机手册查看sfr P0 = 0x00含义:向 P0 所指向的寄存器赋值为 0x00
- sbit
- sbit 表示 特殊功能寄存器中的一位
- keil C51编译器提供的扩展数据类型,取值为
0/1
零星知识
sfr P0 = 0x80; // p0从此仅表示对应寄存器上的8位,可通过 p0 = 0x01 对其8位赋值
sbit P00 = P0^0; // p00 仅表示p0上的最低位,可通过 p0 = 1 对这个位赋值
P00 = ~P00; // ~ 取反符号
/* 合理改值【位运算 运用】
- P1 有8位,如何修改其中的某3位; P15 P14 P13
- 思路:先把指定的几位改为0;将要修改的数据移动到对应二进制位;两数相或;
*/
positon <<= 3;
P1 &= 0xC7;
P1 |= postion;C89变量语法
- 所有的变量都,必须写在当前作用域的最前方
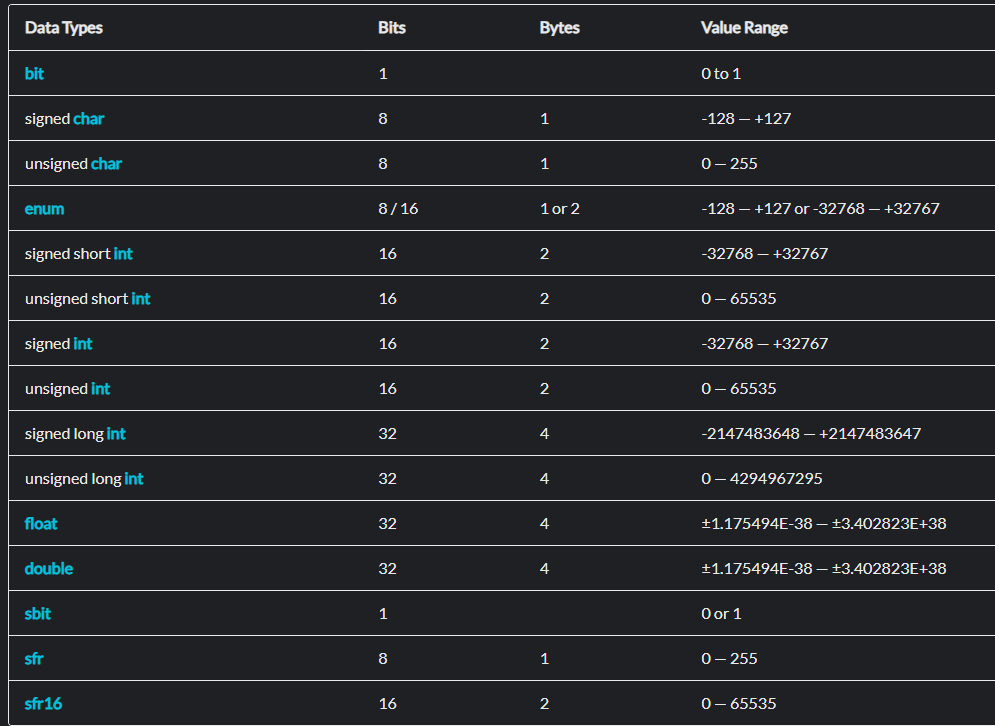
数据类型

模块化编程
将不同的功能、模块拆分到不同文件,再用头文件相互引用。
变量命名
g_前缀标识全局变量,例g_system_states_前缀标识静态变量,例s_internal_counterst_前缀标识静态变量,例st_datap_前缀标识指针,例p_nump_st前缀标识结构体指针,例p_st_data- 常量和宏定义使用全大写字母,并用下划线分割单词,例
MAX_VALUE - 变量通常用小写字母,单词间使用下划线连接,例如
sensor_value - 结构体类型声明使用
_Struct后缀,例Date_Struct - 枚举类型名称使用大写字母开始,例
ColorType - 枚举值使用全大写字母,并用下划线分割单词,
COLOR_RED - 内部变量都要加
static关键字,只能当前文件访问的变量
函数命名
- 采用
{分层}_{模块}_{功能}作为函数名称, - 返回布尔值的函数,名称应是一个问题或断言,
IsButtonPressend() - 获取属性/变量值的函数使用
Get前缀 - 设置属性/变量值的函数使用
Set前缀 - 内部函数都要加
static关键字
文件命名
- 使用
{分层}_{模块}作为文件名称 - 如果项目规模较大,建议头文件和源文件分开
代码分层规范
- 工具函数和常规宏定义
- 特定算法、工具函数、常规宏定义
- 目录 COM
- 前缀 COM_
- 驱动层
- 所有与自身芯片硬件直接交互的代码,例如 GPIO开关、硬件UART、ADC驱动、计时器等
- 目录 Dri/
- 前缀 Dri_
- 接口层
- 位于驱动之上,通过标准接口(GPIO、UART、IIC、SPI等)驱动外部硬件的代码,没有外部硬件可不用这一层
- 目录 Int/
- 前缀 int_
- 中间层
- 提供更高级的服务,如操作系统、文件系统、通信协议栈等。通常用于复杂单片机项目,简单项目不涉及这一层
- 目录:Mid/
- 前缀:Mid_
- 应用层
- 包含应用程序的主要逻辑,只与 中间层/接口层 进行交互,尽量不直接访问驱动层
- 目录:App/
- 前缀:App_
中断系统
中断系统:单片机CPU用于处理外部紧急事件的机制,使单片机能够实时响应外部事件,提高系统的灵活性和响应能力
概念
- 中断源:能够引发中断的事件
- 中断标志位
- 用于标识某个中断是否发生,每个中断都有一个与之对应的中断标识位
- 某个中断发生时,相应中断标志位就会置为1
- 当CPU检测到标志位为 1 时,就处理相应的中断
- CPU处理完,中断标志位需复位 0【自动复位 / 手动复位 - 参看文档】
- 中断服务程序:中断后要处理的逻辑
- 中断优先级
- 高优先级可以打断低优先级的中断
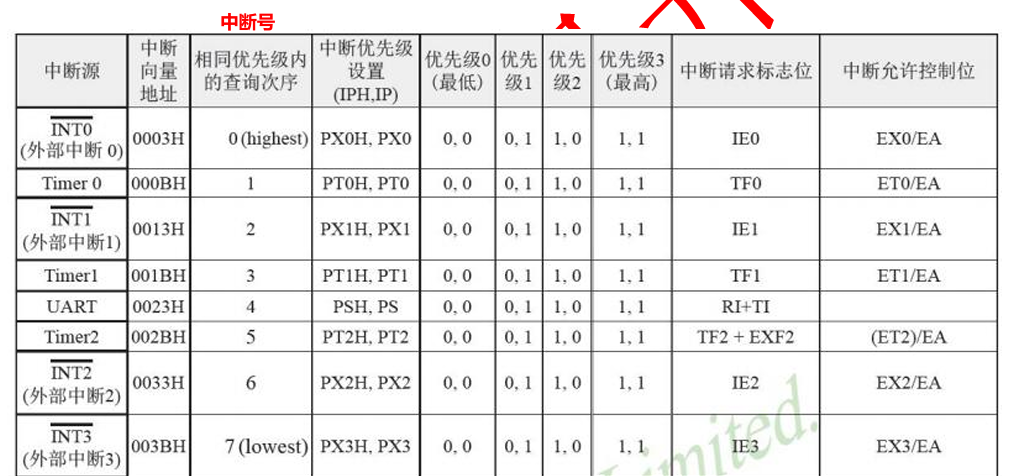
STC89C52RC
中断源共8个
- 外部中断
- 引脚:
INFT0 INFT1 - 由单片机外部紧急事件触发的中断,通过特定引脚发送特定的信号触发
- 特定信号:51单片机支持两种触发方式:低电平触发、下降沿触发
- 引脚:
- 定时器中断
- 定时器:
Timer0 Timer1 Timer2,每个定时器都有对应的中断 - 由单片机内部的定时器触发的中断
- 定时器是单片机自身具备的功能模块,用于实现定时任务,设置指定时间后触发回调
- 定时器:
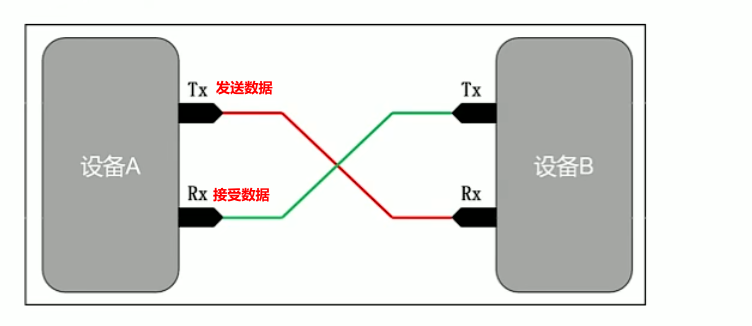
- 串口中断【全双工】
- 串口引脚:
TxD 发送数据 RxD 接收数据 - 由单片机串口触发的中断,当串口接收到数据或者发送完整数据后都会触发相应的中断
- 串口引脚:
- 外部中断
中断服务程序语法
interrupt关键字,表示当前函数为中断服务程序0中断号- 每个中断都有唯一的中断号,标识当前中断服务程序处理的中断 - 中断号定义查手册
c// 函数名-无特殊要求 void 函数名 interrupt 0 { // 编写中断处理逻辑 }中断优先级
- STC89C52RC共有四个中断优先级,每个中断都可单独设置优先级
- 优先级高的先被处理,中断优先级相同时,中断号小先执行
- 中断嵌套:高优先级中断 可打断 低优先级中断
- STC89C52 仅支持两级中断嵌套,更多的会被搁置等待
外部中断
- 使用步骤
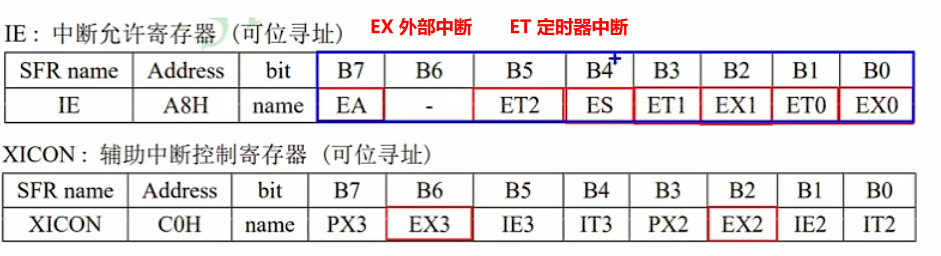
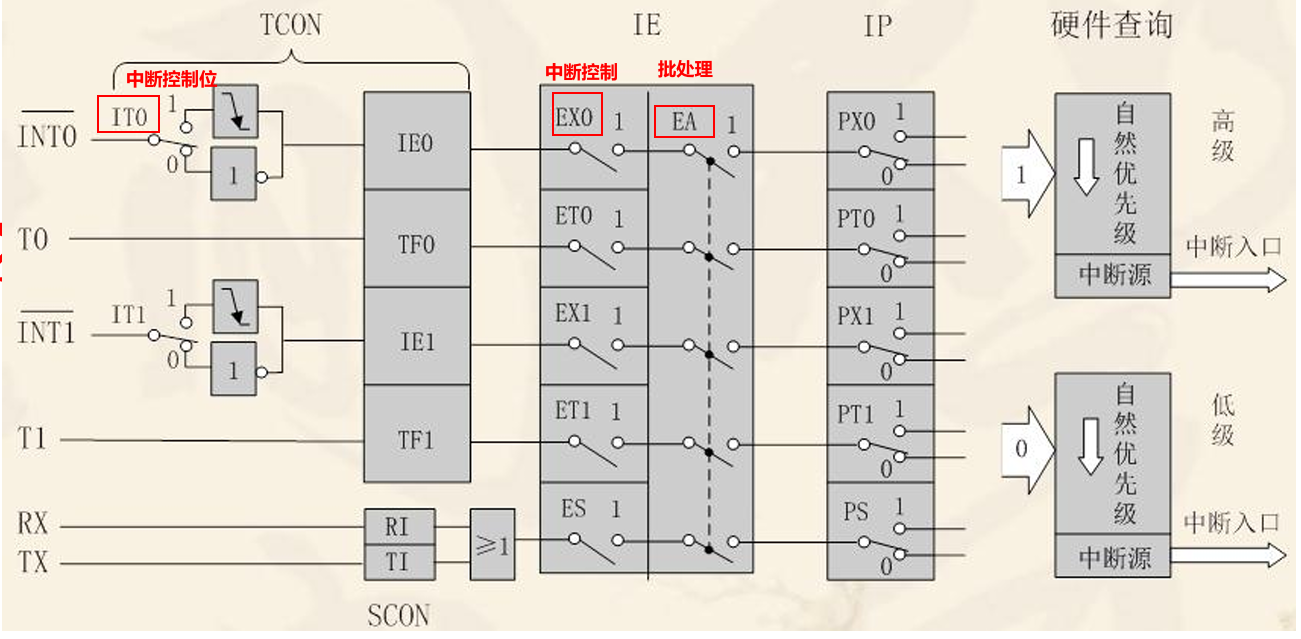
- 默认CPU会屏蔽所有中断请求,必须先启用再使用。由单片机内的两个特殊功能寄存器控制 - 中断控制
- IE 中断允许寄存器
EA=1 EX0=1 - XICON 辅助中断控制寄存器
- IE 中断允许寄存器
- 配置外部中断触发方式 - 终端控制位
- STC89C52RC 支持两种触发方式:下降沿触发、低电平触发
- 每个外部中断各需要一个控制位设置触发方式,分别位于
XICON和TCON寄存器
- 中断优先级【可选】
- 支持两级/四级优先级,每个中断源的优先级都需通过1个/2个控制位进行配置,可能位于
IPH-中断优先级高位 IP-中断优先级地位 XICON-辅助中断控制
- 支持两级/四级优先级,每个中断源的优先级都需通过1个/2个控制位进行配置,可能位于
- 默认CPU会屏蔽所有中断请求,必须先启用再使用。由单片机内的两个特殊功能寄存器控制 - 中断控制
// K3按键按下后触发中断,k3接的外部中断INT0
#include <STC89C5xRC.H> // 包含STC89C52的头文件
void INT0_Init()
{
EA = 1; // 总中断使能
EX0 = 1; // 外部中断0使能
IT0 = 1; // 外部中断 - 下降沿触发
}
void main()
{
INT0_Init();
while (1) {
}
}
// 中断处理程序
void INT0_CallBack() interrupt 0
{
delay_10us(1000); // 消斗
if(KEY3==0) P20 = ~P20; // 再次判断K3键是否按下,并翻转LED状态
}定时器中断
定时器相比软件延时,具有更高的精确度
- 工作原理
- 使用一个n位的脉冲计数器,对时钟信号的脉冲进行计数,每个脉冲+1,当计数器达到最大值时溢出,触发定时器中断
- 脉冲:信号在短时间内
从低到高,再返回低电平的过程 - 周期:两个相邻脉冲的时间间隔
- 频率:单位时间内脉冲重复的次数
1s/周期 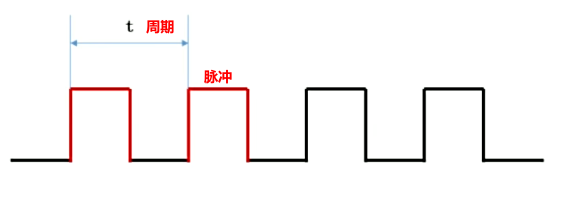
- 脉冲:信号在短时间内
- 定时时长的影响因素
- 脉冲计数器的位数
- 分为8、16、32位
- 脉冲计数器的初始值
- 时钟信号的频率
- 脉冲计数器的位数
- 使用一个n位的脉冲计数器,对时钟信号的脉冲进行计数,每个脉冲+1,当计数器达到最大值时溢出,触发定时器中断
- 使用步骤
- 启动定时器中断
ET0 ET1- 定时器的启动可被单片机 内部寄存器控制 或 外部引脚控制
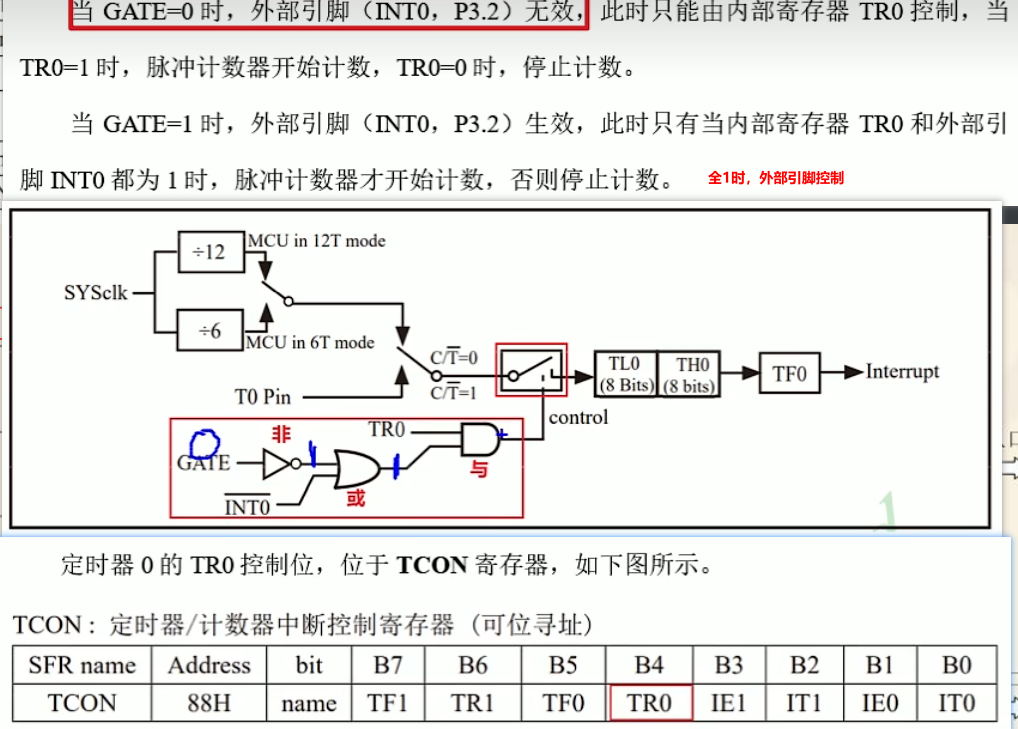
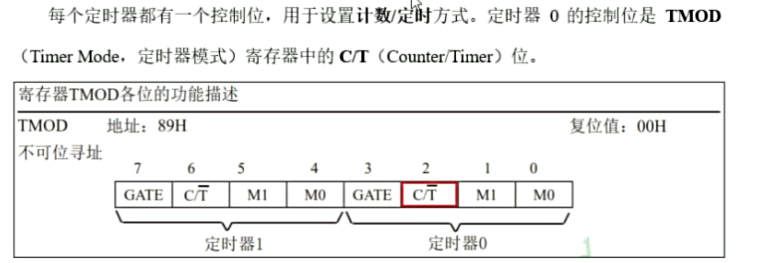
- 选择
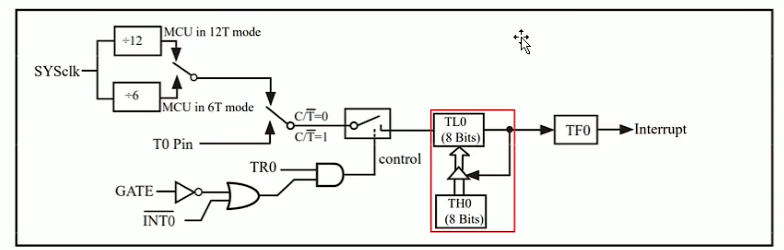
计数/定时方式【脉冲来源不同】TMOD- 定时方式-用于产生精确的时间延迟 -
系统时钟的脉冲信号 - 计数方式-用于统计外部脉冲信号的个数 -
单片机外部引脚的脉冲信号 - 每个定时器都有一个控制位,用于设置工作模式
TMOD不支持按位寻址,需整体赋值
- 定时方式-用于产生精确的时间延迟 -
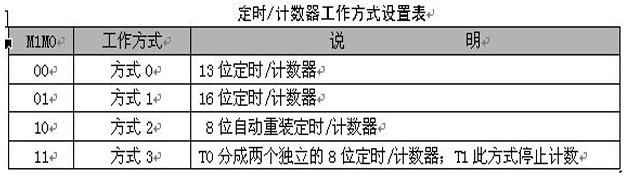
- 选择工作模式
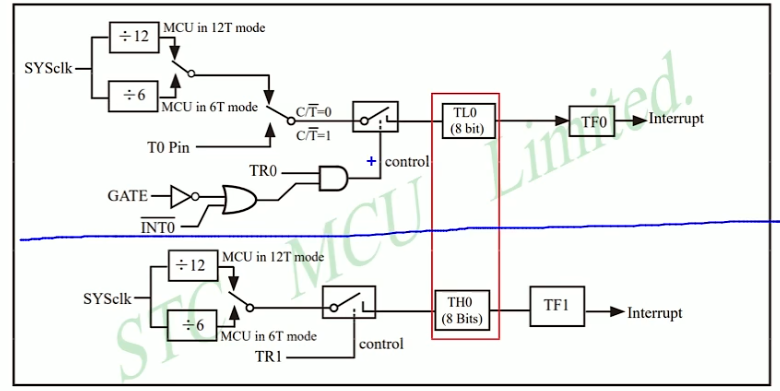
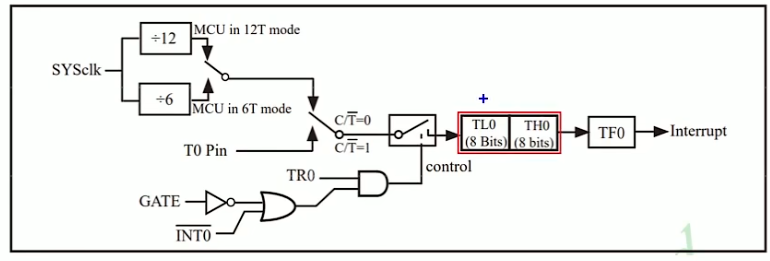
TMOD- 定时器0共有四种工作模式
- 13位【兼容】:最大8192,TL0和TH0两个8位寄存器用于存储脉冲计数器数值,TL0仅用低5位
- 16位:最大65536,TL0和TH0两个8位寄存器用于存储脉冲计数器数值
- 8位自动重装载
- 13位、16位,一次执行完,需开发者重新为脉冲计数器设置初始值
- 自动重装载能够再脉冲计数器溢出时,自动重新设置初始值,适用于执行周期性任务
- TL0 用于存储脉冲计算器的初始值,TH0 用于存储脉冲计数器的初始值,每次溢出后自动恢复到TH0的值
- 双8位
- 该模式下,TL0、TH0分别用作一个脉冲计数器,适用于脉冲计数器不够时拆分
- 定时器0共有四种工作模式
- 启动定时器中断
脉冲计数器初始值
- 以16位工作模式为例,实现1ms定时
- 已知:最大65536,12分频,时钟频率11.0592MHz = 11059.2KHz = 11059200hz
12分频后的频率 = 计数脉冲频率 = 11059200/1212分频后的时间 = 1/计数脉冲频率 = 12/11059200s ≈ 1.08us- 1ms所需脉冲数:
0.001/(12/11059200) ≈ 922 - 脉冲应设初始值:
65536-922 = 64614
// 赋值
TL0 = 64614; TH0 = 64614 >> 8; // 直接赋值,简单
TL0 = 0x66; TH0 = 0xFC; // 使用传统十六进制,高效定时器中端解耦demo
// 16位定时器实现led灯 1s闪烁1次 单文件版
// main.c
#include "Dri_Timer0.h"
void main()
{
Dri_Timer0_Init();
while (1) {
}
}
// Dri_Timer0.c
#include <STC89C5xRC.H> // 包含STC89C52的头文件
#include "Dri_Timer0.h"
void Dri_Timer0_Init(){
// 1.启用终端
ET0 = 1; // 使能定时器0中断
EA = 1; // 总中断开启
// 2.工作模式:GATE=0;C/T=0;M1=0;M0=1;
TMOD = (TMOD & 0xF0) | 0x01; // 设置定时器0:16位定时模式
// 3.设置初始值
TL0 = 64614; // 设置定时器0低8位的初值
TH0 = 64614 >> 8; // 设置定时器0高8位的初值
// 4.启动定时器 0-开始计数 0-停止
TR0 = 1;
}
void Dri_Timer0_Handler() interrupt 1
{
// 局部静态变量,
// - 静态变量生命周期与程序一致,整个程序结束前都不会被销毁重建
// - 只能被当前函数访问,避免被外部意外修改
static unsigned int temp = 0;
// 重装载脉冲计数器-初始值
TL0 = 64614;
TH0 = 64614 >> 8;
temp++;
if (temp >= 1000) {
temp = 0;
P20 = ~P20; // 翻转P20引脚的电平
}
}// 解耦版
// main.c
// main.c
// 16位定时器实现led灯 1s闪烁1次
#include <STC89C5xRC.H>
#include "Dri_Timer0.h"
void LED_Blink(void)
{
// 局部静态变量,
// - 静态变量生命周期与程序一致,整个程序结束前都不会被销毁重建
// - 只能被当前函数访问,避免被外部意外修改
static unsigned int temp = 0;
temp++;
if (temp >= 1000) {
temp = 0;
P20 = ~P20; // 翻转P20引脚的电平
}
}
void main()
{
Dri_Timer0_Init();
Dri_Timer0_RegisterCallBack(LED_Blink); // 注册回调函数
while (1) {
}
}
// Dri.Timer0.h
// Dri.Timer0.h
#ifndef __DIR_TIMER0_H__
#define __DIR_TIMER0_H__
#include "Com_Util.h"
void Dri_Timer0_Init();
/**
* @brief: 注册Timer0的中断回调函数,参数FUN是一个函数指针,指向将要注册的回调函数
* @return bit 0-失败 1-成功
*/
bit Dri_Timer0_RegisterCallBack(FUN callback);
/**
* @brief: 取消Timer0的中断回调函数,参数FUN是一个函数指针,指向将要注册的回调函数
* @return bit 0-失败 1-成功
*/
bit Dri_Timer0_DelCallBack(FUN callback);
#endif
// Dri.Timer0.c
// Dri.Timer0.c
#include <STC89C5xRC.H> // 包含STC89C52的头文件
#include "Dri_Timer0.h"
#define MAX_CALLBACK_NUM 4
#define NULL ((void *)0) // 定义NULL
static FUN s_callbacks[MAX_CALLBACK_NUM]; // 定义一个静态数组,用于存放回调函数指针
void Dri_Timer0_Init()
{
unsigned char i;
// 1.启用终端
ET0 = 1; // 使能定时器0中断
EA = 1; // 总中断开启
// 2.工作模式:GATE=0;C/T=0;M1=0;M0=1;
TMOD = (TMOD & 0xF0) | 0x01; // 设置定时器0:16位定时模式
// 3.设置初始值
TL0 = 64614; // 设置定时器0低8位的初值
TH0 = 64614 >> 8; // 设置定时器0高8位的初值
// 4.启动定时器 0-开始计数 0-停止
TR0 = 1;
// 初始化回调数组
for (i = 0; i < MAX_CALLBACK_NUM; i++) {
s_callbacks[i] = NULL;
}
}
bit Dri_Timer0_RegisterCallBack(FUN callback)
{
unsigned char i;
for (i = 0; i < MAX_CALLBACK_NUM; i++) {
if (s_callbacks[i] == callback) return 1;
if (s_callbacks[i] == NULL) {
s_callbacks[i] = callback;
return 1;
}
}
return 0;
}
bit Dri_Timer0_DelCallBack(FUN callback)
{
unsigned char i;
for (i = 0; i < MAX_CALLBACK_NUM; i++) {
if (s_callbacks[i] == callback) {
s_callbacks[i] = NULL;
return 1;
};
}
return 0;
}
void Dri_Timer0_Handler() interrupt 1
{
unsigned char i;
// 重装载脉冲计数器-初始值
TL0 = 64614;
TH0 = 64614 >> 8;
for (i = 0; i < MAX_CALLBACK_NUM; i++) {
if (s_callbacks[i] != NULL) s_callbacks[i]();
}
}
// Com_Util.h
// Com_Util.h
#ifndef __COM_UTIL_H__
#define __COM_UTIL_H__
typedef unsigned char u8;
typedef unsigned long u32;
typedef void (*FUN)(void);
void Com_Util_Delay100us(void);
void Com_Util_Delay1000ms(void);
#endif通讯
概念
- 串行通讯:设备间的数据 通过一条数据线 逐位传输
- 并行通讯:设备间数据 通过多条数据线 同时传输
- 单双工:只允许数据在一个方向上传输,只能从发送端到接收端
- 半双工:数据方向不限制,但同一时刻,数据只能在一个方向上传输
- 全双工:允许数据同时在两个方向上传输,效率最高
- 发送方/接收方 对数据的协调统一
- 同步通讯:发送方发送数据时,同时发送自己的时钟信号;接收方在时钟周期的
下降沿/上升沿时接收数据(使用相同的时钟信号) - 异步:统一发送方发送数据和接收方接收数据的频率,不需要额外的时钟信号
- 同步通讯:发送方发送数据时,同时发送自己的时钟信号;接收方在时钟周期的
UART串口
- 全双工通讯
- 通用异步收/发(Universal Asynchronous Receiver/Transmitter):异步、全双工的串行通信接口,常用于微控制器与计算机、其他微控制器或外部设备之间的数据交换
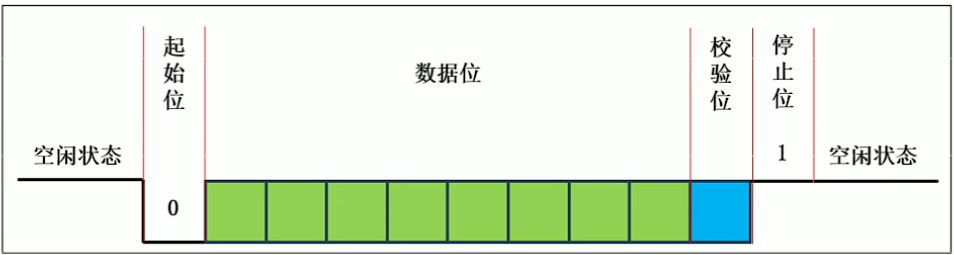
数据格式
- 数据 逐帧Frame 发送,每个数据帧通常包括:起始位、数据位、校验位、停止位
- 空闲状态:没有数据传输时,应为高电平
- 起始位:起始位用低电平
- 数据位:传输的主体内容,长度5-9位,一般为8位,低电平0,高电平1
- 校验位(可选):校验当前帧的数据正确性
- 奇校验:数据位1的数目位偶数,校验位为1,否则0
- 偶校验:数据位1的数目位偶数,校验位为0,否则1
- 停止位:数据帧的结束,通常为1位或2位,应为高电平
- 其他约定
- 波特率(Baud Rate)
- 表示数据传输速率,每秒传输的基本符号
symbol数,二进制的基本符号为0/1,因此二进制中 波特率与比特率相等,1位就是1个符号 - 四进制中,1个符号等于2bit位
- 表示数据传输速率,每秒传输的基本符号
- 波特率(Baud Rate)
工作模式
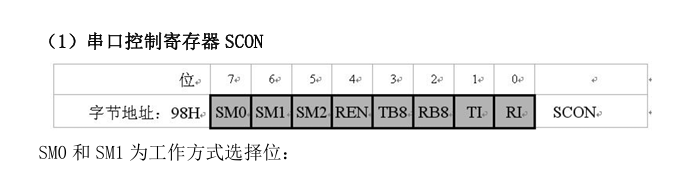
| 方式 | 功能(数据位+校验位) | 波特率 | SM0 | SM1 | |
|---|---|---|---|---|---|
| 0 | 同步移位串行:移位寄存器 | SYSclk/12 | 半双工同步通讯,时钟信号TxD,数据信号RxD | 0 | 0 |
| 1 | 8位UART,无校验位,波特率可变 | 定时器1溢出率+SMOD | 0 | 1 | |
| 2 | 9位UART,波特率固定,8数据位+1校验位 | SYSclk系统时钟+SMOD | 1 | 0 | |
| 3 | 9位UART,波特率可变 | 定时器1溢出率+SMOD | 1 | 1 |
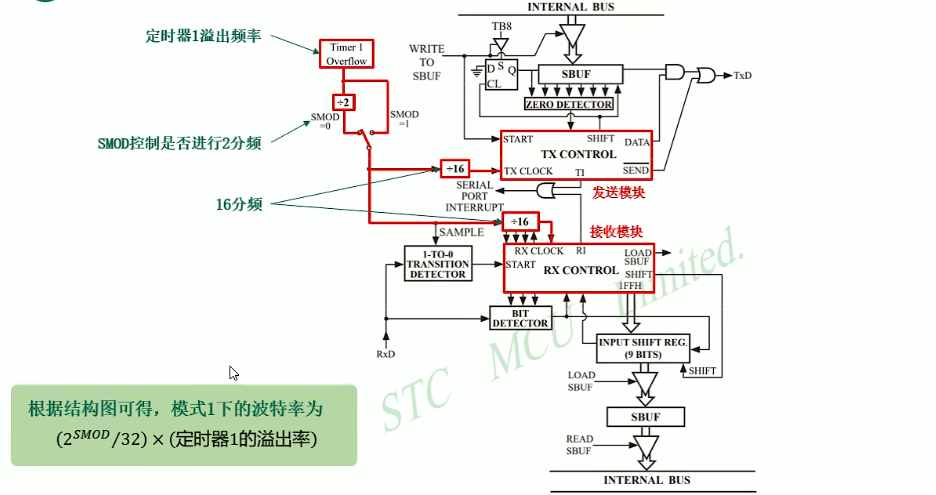
波特率设置
常见波特率:4800、9600、19200、38400、57600、115200;9600≈1.17kb/s
- 方式1,波特率受SMOD控制位、定时器1的溢出频率
- 设置波特率,9600为例
- SMOD位于
PCON 电源控制寄存器,不可按位寻址,设置为0,波特率=定时器1溢出率/32
- SMOD位于
demo
IIC
用在集成电路IC之间的串行通信总线,同步串行通信
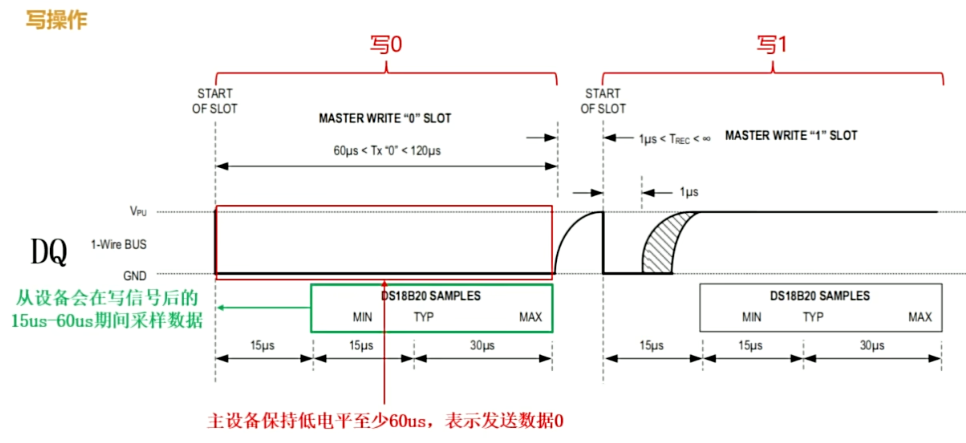
- 协议规定
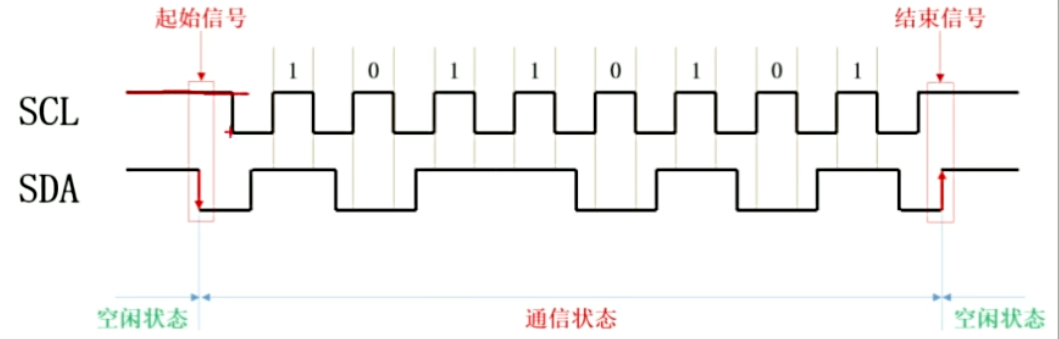
- 数据传输的数据线SDA 和 同步的时钟线SCL 两根线路组成,每个SCL周期SDA传输一位数据
- 数据接收方 在每个时钟的高电平期间读取数据,SCL为高电平时,读取SDA上的数据
- SDA必须在SCL低电平期间准备好下一位数据,在SCL高电平期间保持稳定
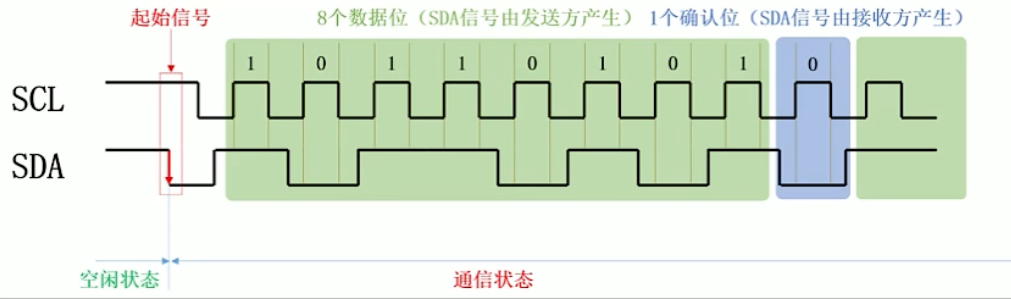
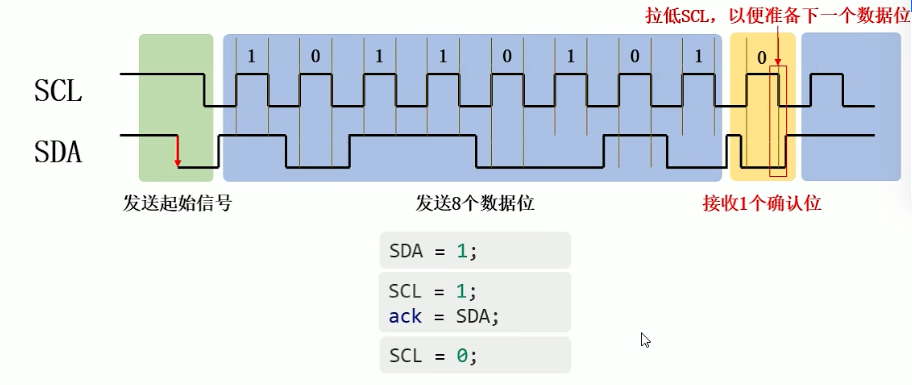
- 发送方每发送一个字节(8位)数据,接收方都应向发送发回复一个1位的确认信号
- 所有设备的SCL和S D.A.银角都需要以开漏模式接入总线
- 所有设备的SCL和SDA银角都需要以开漏模式接入总线
- 主从架构
- 主设备
- 一个主设备可连接多个从设备,
- 主设备负责发起通信和控制总线
- SCL信号线的信号始终由主设备产生
- 从设备
- 负责响应主设备的请求
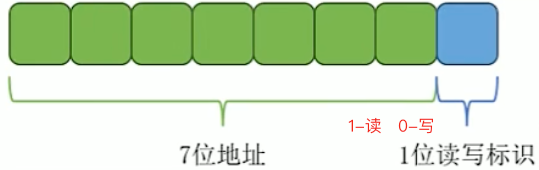
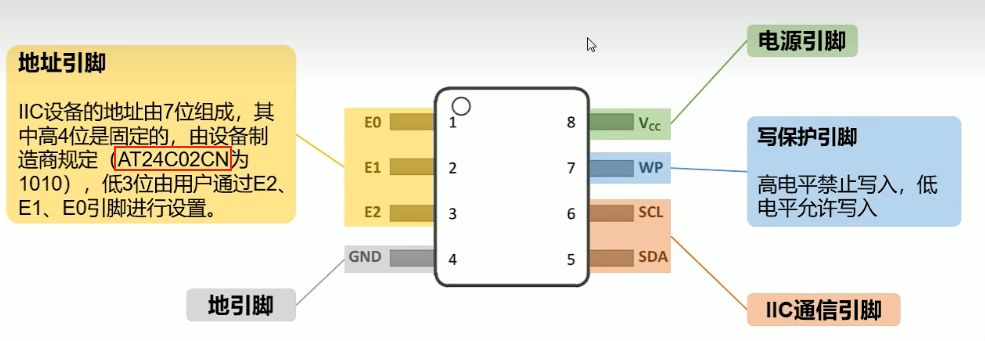
- 每个从设备都有唯一的地址(7位二进制数字)
- SDA信号线可由 主/从 设备产生
- 主设备产生SDA时,从设备接收信号
- 某个从设备产生SDA时,主设备接收信号
- 主设备
- 通信过程
- 发送起始信号
- 发送目标设备地址+读写标识
- 接受从设备的确认信号
- 与从设备进行数据传输(发送/接收)
- 发送终止信号

信号格式
- 空闲状态:SDA和SCl 均为高电平
- 起始信号:SCL为高电平时,SDA由高到低
- 停止信号:SCL为高电平时,SDA由低到高
- 确认信号 NACK
- 发送方每发送一个字节(8位)数据,接收方都应向发送发回复一个1位的确认信号【不区分主从】
- 0-表示成功接收到该字节 1-未能接受/不希望接受更多的数据
从机地址与读写标识
- 开始通信前,主设备需与所有的从设备建立联系再通信,其次主设备还需向目标设备明确通信的操作是读数据还是写数据
- 实现过程
- 主设备发送起始信号后,向所有的从设备发送1字节数据,前7位为目标设备地址,第8位为读/写标识
- 各个从设备收到信号后进行设备地址比对,相同的从设备将回复确认信息,不同的设备不做回应
- 主设备收到确认信号后,开始通信
手写IIC
EEPROM
EEPROM (Electrically Erasable Programmable read only memory) 带电可擦写可编程只读存储器,断电后仍能保存数据,可多次写入擦出数据【ROM随历史演变 - 用于表示掉电不丢失/非易失】【RAM - 易失性】
例 型号AT24C02CN 的EEPROM存储容量为2K(2048位,256字节),采用IIC协议进行读写
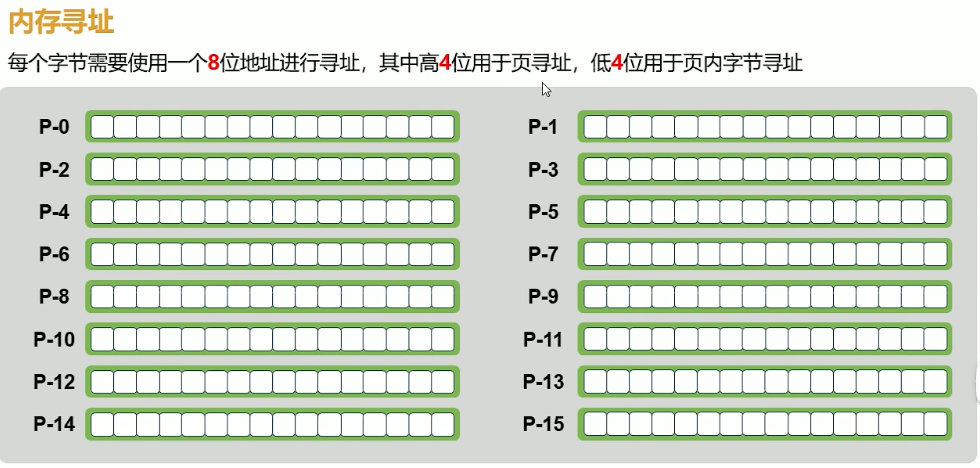
- 内部256字节被分为 16个数据页,每页都是16个字节
- 写数据时,最小单位为字节,而不能是某一位
操作
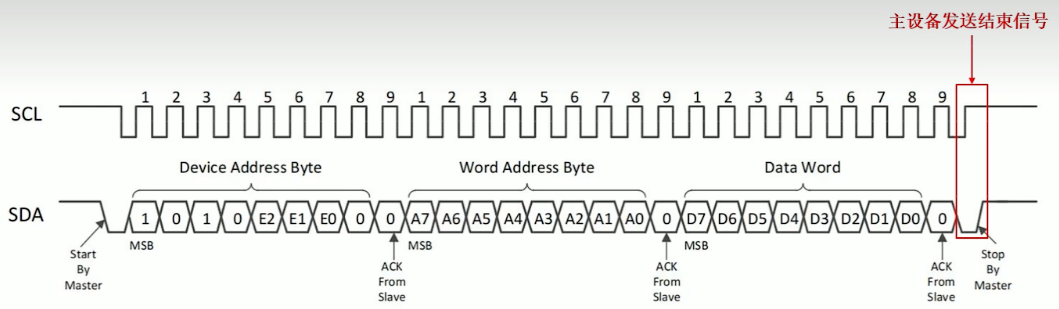
Byte Write 一次写一字节
- EEPROM接收到停止信号后,将开启内部的写周期,将接收到的数据写入存储器的物理介质,在此期间所有的外部输入均会被拒绝,直到当前数据写入完成。
- 写周期的时间可通过手册查询,因此连续写入多个字节时,每个字节完成后至少需等待Twr之后才能写入下个字节
Page Write 一次写一页
- 一次一次最多写入1页(16个字节)的数据
- 从主设备发送的字地址开始,逐字节顺序写入
- 写到页边界时,下一个字节不会进入下一页,而是会回到当前页的起始位置
- 当EEPROM在接收到最后的结束信号后,才会开启内部的写周期,将刚刚收到的一页数据统一写入存储器的物理介质,在次期间,所有外部输入均会被拒绝,直接当前页写入完成。内部写周期的时长仍为t_WR
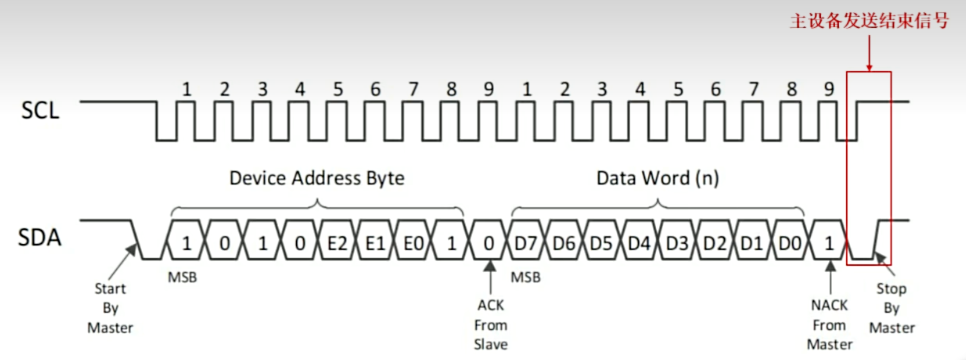
Current Address Read 读当前地址/1字节
- EEPROM内部有一个地址寄存器,用于记录当前读写操作的字节地址,每当完成一个字节的操作后,该地址会自动至强下一个字节。
- 单独使用时无法知道当前字节存在哪个位置
Random Read 随机读
- 用于读取任意指定地址的一个字节
- 原理:假写但不写,直接重新开始 + 真读
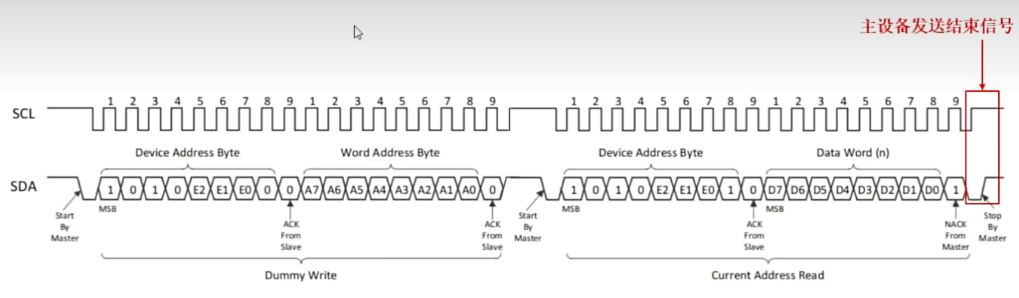
Sequential Read 连续读
- 用于读取连续的多个字节,起始位置可以是当前地址,也可以由用户指定任意位置
- 指定任意位置的方式依旧是使用 Dummy Write 假写
- 读到页边界时会自动读下一页,读到最后一页的页边界后自动进入第一页
- 与随机读类似,只是第一个字节后的确认信号为 0 ,标识继续读
说明
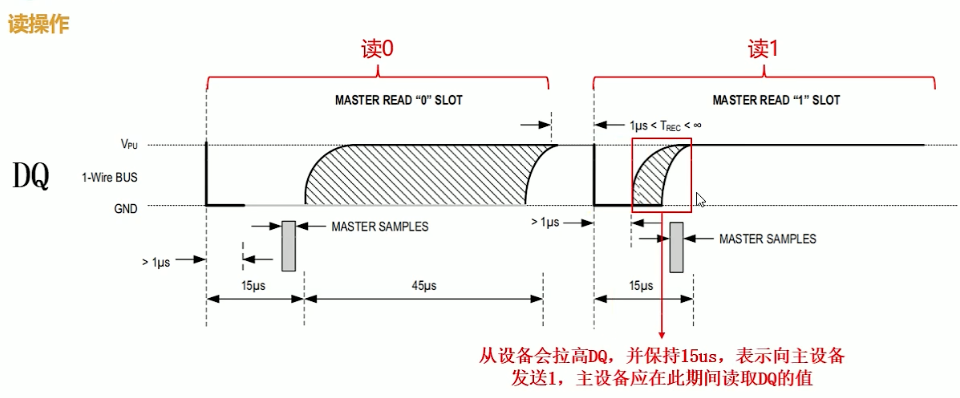
1-wire
半双工、串行通信协议,主要用于各种低成本、低功耗传感器和存储设备进行数据交换,类似IIC协议采用主从架构,一个主设备可连接多个从设备。
要求各设备以开漏模式接入,因此DQ信号线要使用上拉电阻
1-wire总线中,每个从设备都有一个唯一64位地址,用于设备识别和通信,由制造商在生产设备时烧录,不可更改
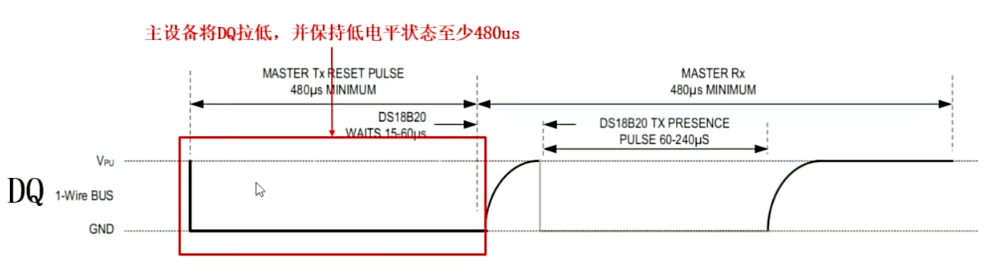
初始化
- 每次通信主设备都要先发送一个复位脉冲,从设备接收到该脉冲后会进行复位,然后回复一个存在脉冲,主设备可根据存在脉冲获取从设备的健康状态
常用功能
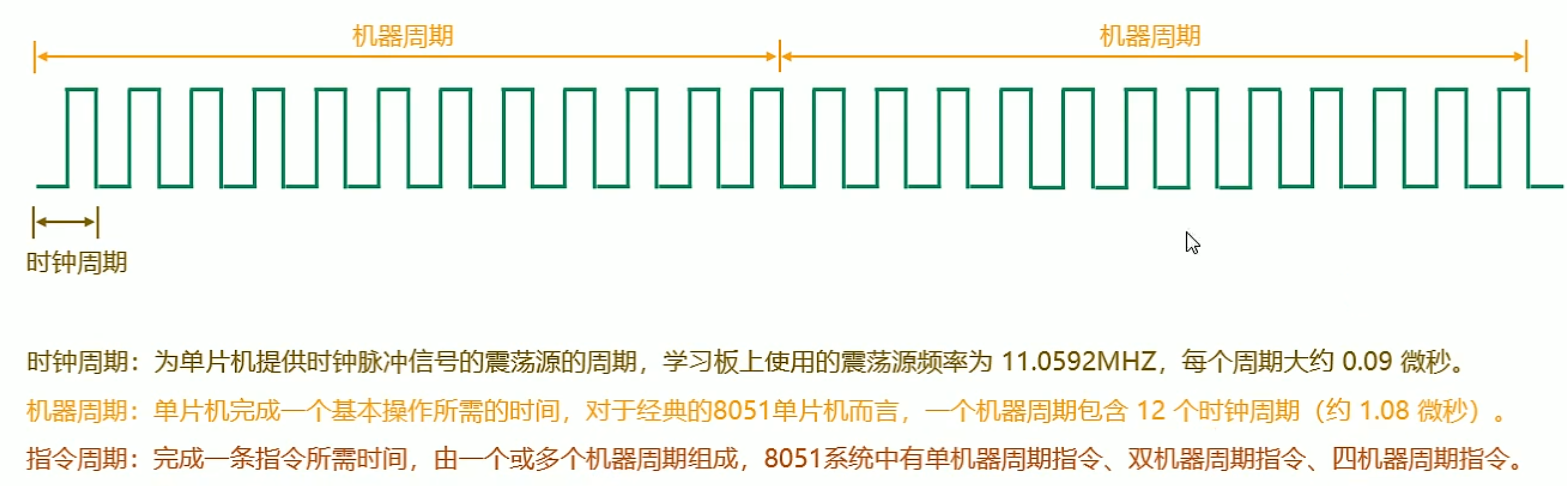
时间控制
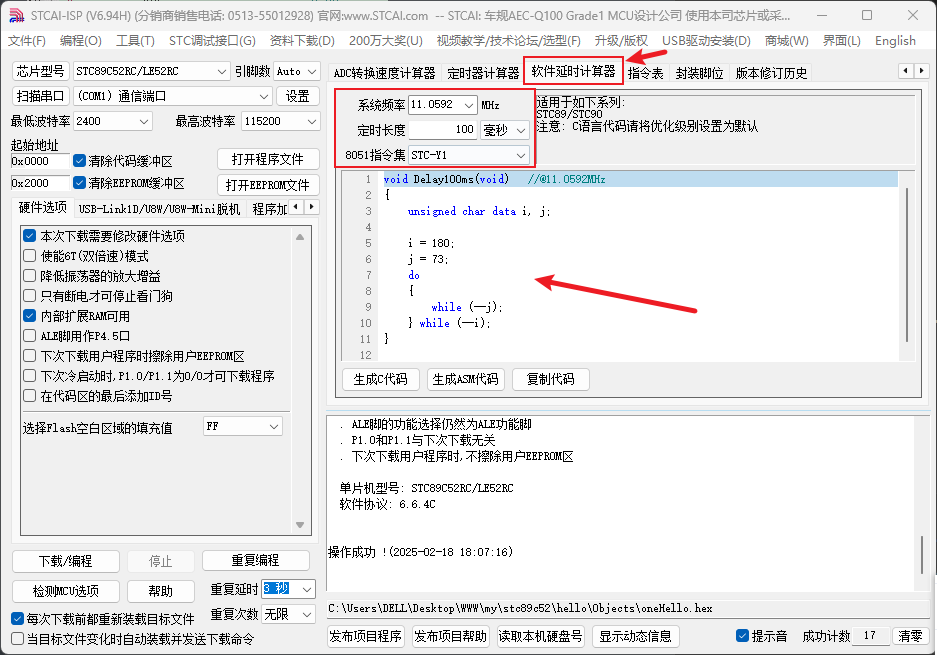
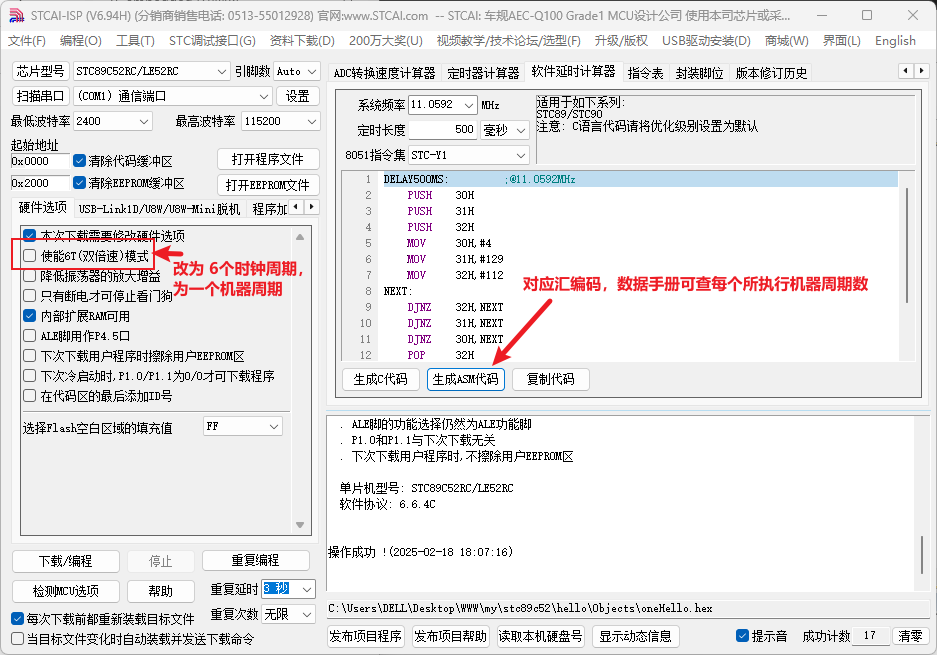
软件延时
通过执行无效命令,达到计时效果,拖住程序的运行
- 借助工具生成,特定的软件延时函数
- 定时长度(一般使用1ms,然后通过传参形式复用任意时间长度)
- 选择系统频率(查单片机配置的晶振频率)
#include <STC89C5xRC.H> // 包含STC89C52的头文件
#include <INTRINS.H> // _nop_() 所在头文件
void Delay500ms(void) //@11.0592MHz
{
unsigned char data i, j, k;
_nop_();
i = 4;
j = 129;
k = 119;
do
{
do
{
while (--k);
} while (--j);
} while (--i);
}
void main(){
do{
P20 = ~P20;
Delay500ms();
}while(1); // 死循环,让它不会执行结束
}
延时原理
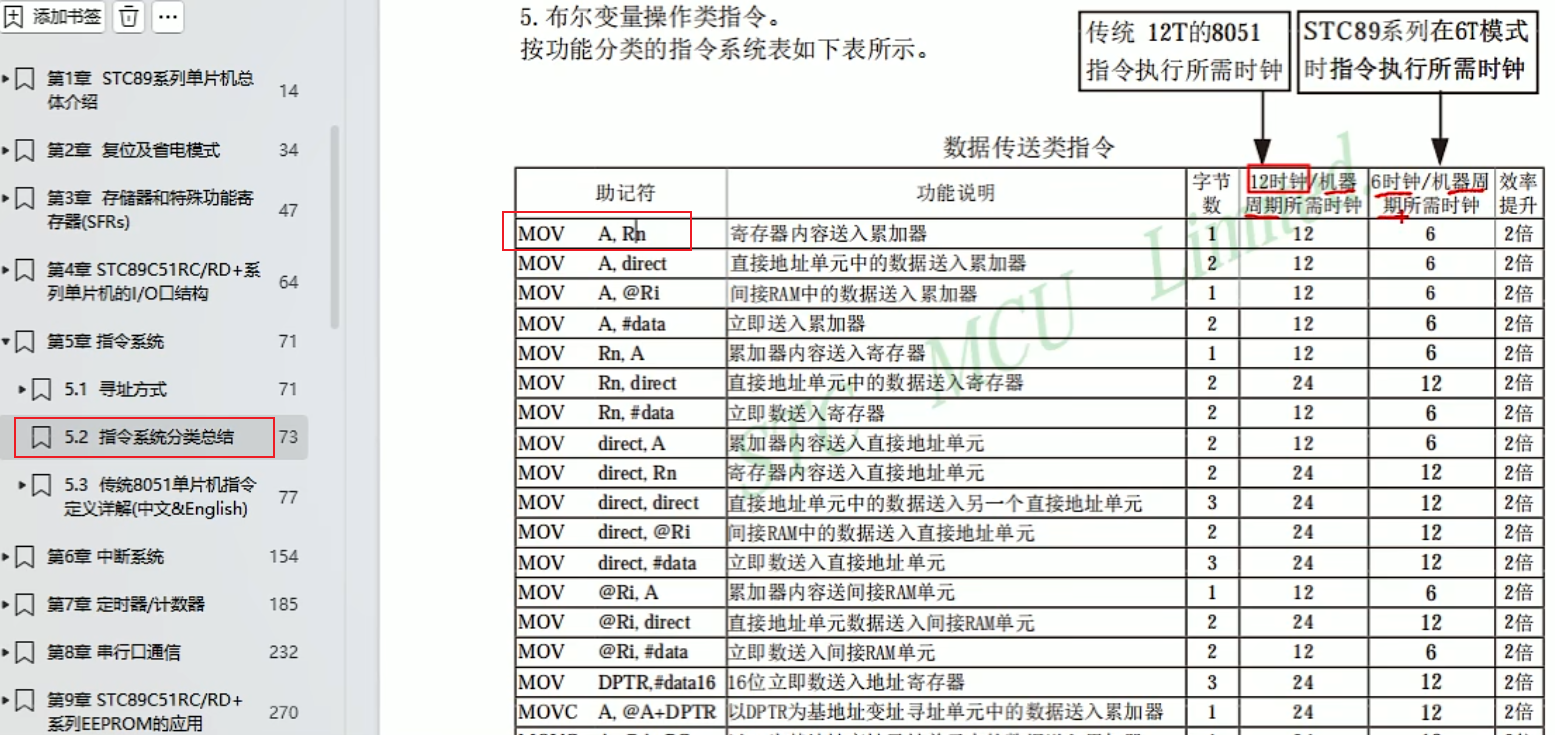
- 软件延时函数,生成为ASM汇编代码;芯片数据手册中,指令系统描述了每条汇编指令执行所需的时钟周期
- 默认使用的是 12个时钟周期作为一个机器周期,可开启烧录工具的 双倍速模式-使用6个时钟周期作为一个机器周期
- 注意
- 开启 6T模式后,由于时钟周期缩短,延时函数对应减半
学习demo
流水灯
#include <STC89C5xRC.H> // 包含STC89C52的头文件
#include <INTRINS.H>
void Delay100ms(void) //@11.0592MHz
{
unsigned char data i, j;
i = 180;
j = 73;
do{
while (--j);
} while (--i);
}
unsigned char tmp = 0x01;
void main(){
do{
if(tmp == 0x00 ){ tmp=0x01; }
P2 = ~tmp;
Delay100ms();
tmp<<=1;
}while(1);
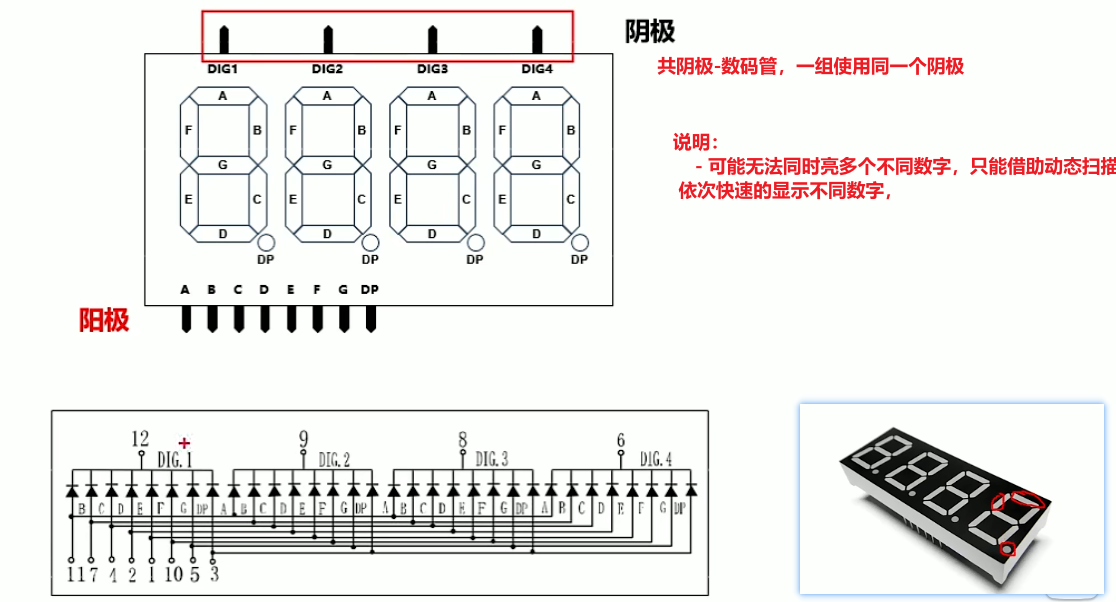
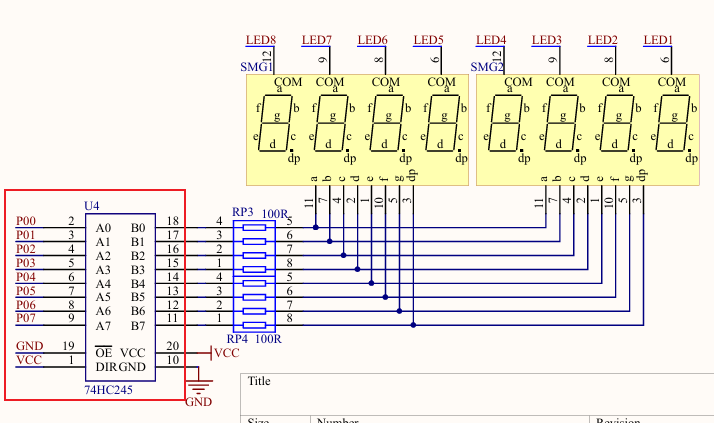
}数码管
- 概念
- 段选:确定显示的内容
- 位选:确定显示的数字位置
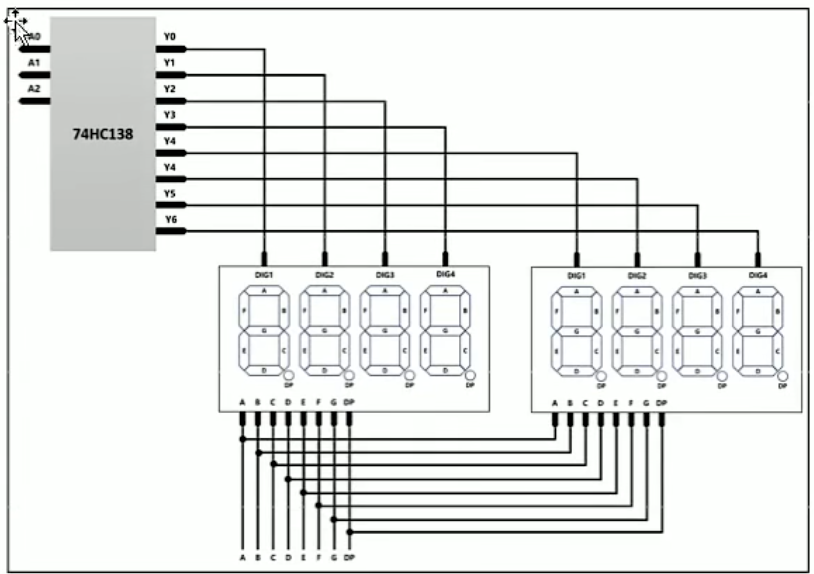
- 扩展
- 优化电路:使用 74HC38译码器 较少引脚使用-但同时只能展示一个数字
- 驱动灯管:74HC245N驱动器,提升输出电压,让数码管亮
- 注意
- 切换前显示的数字为置空,会导致下一位在动态切换时存在略微重影
#include <STC89C5xRC.H> // 包含STC89C52的头文件
#include <INTRINS.H>
void Delay100us(void) //@11.0592MHz
{
unsigned char data i, j;
_nop_();
_nop_();
i = 2;
j = 15;
do {
while (--j);
} while (--i);
}
typedef unsigned char u8;
unsigned int tmp = 0;
static u8 arr[10] = {0x3f, 0x06, 0x5b, 0x4f, 0x66, 0x6d, 0x7d, 0x07, 0x7f, 0x6f};
/**
* @brief 数码管 指定位置->指定数字 显示
* @param{u8} position 片选[0-7]
* @param{u8} num 要显示的数字[0-9]
*/
void showNum(u8 position, u8 num)
{
P0 = 0x00; // 置空,避免设置时,旧的数据保存在P0中切换时存在重影
// 控制哪个数字亮
P22 = position % 2;
P23 = position / 2 % 2;
P24 = position / 2 / 2 % 2;
P0 = arr[num]; // 控制数字的哪个位灭-默认输出高/亮
}
void main()
{
do {
// 循环显示 76543210
if (tmp >= 8) {
tmp = 0;
}
showNum(tmp, tmp);
Delay100us();
tmp += 1;
} while (1);
}
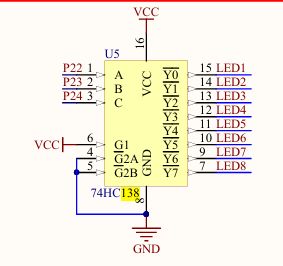
74HC138译码器
作用:将3位二进制的输入转换为8位的二进制输出,同一时刻只有一个为低电平;例如:74HC138
- 用途
- 数码管使用时,位提升GPIO的利用率,将两个数码管的阴极接到38译码器,实现同一时刻只点亮一个数字

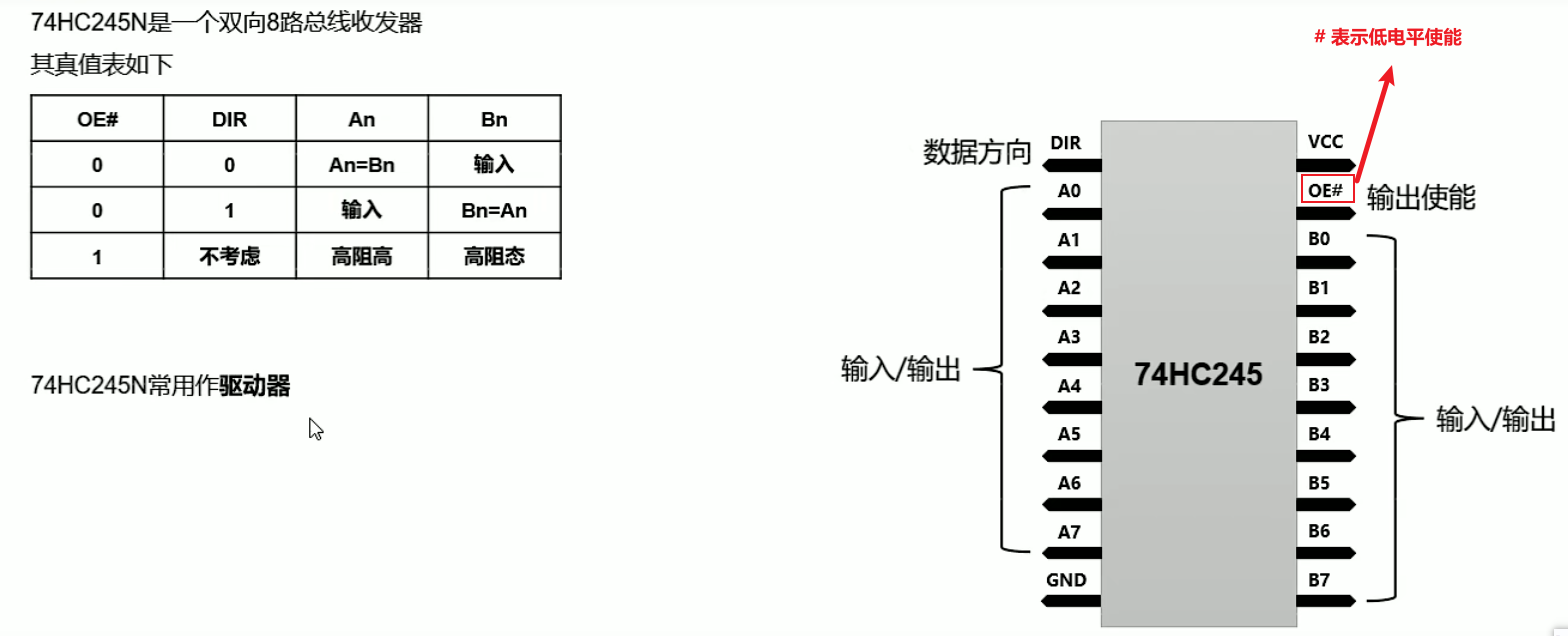
245驱动器
245驱动芯片:由于51单片机高电平的驱动能力很微弱【为保证输入模式时-输入后引脚内部能感知-因此内部默认给出的高电平较小】,不足以点亮数码管,因此可使用 74HC245N作为驱动芯片
- 74HC245N驱动器
- 官方定义:双向的8路总线收发器
74HC595?
直接代替 74HC245N驱动器 和 74HC38译码器
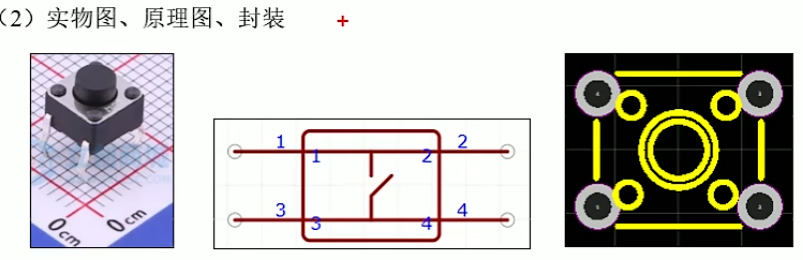
按键
- 介绍
- 相当于开关,按下接通/断开,松开断开/接通
- 12导通,34导通的目的:避免按键长期使用后出现松动
Demo
/* 点击按键控制led灯的亮灭 - 采用按键检测 与 逻辑分离 */
// mian.c
#include <STC89C5xRC.H> // 锟斤拷锟斤拷STC89C52锟斤拷头锟侥硷拷
#include "Int_Key.h"
void main(){
do {
if (Int_Key_IsDownP30()) P20 = ~P20;
} while (1);
}
// Int_Key.h
#ifndef _INT_KEY_H
#define _INT_KEY_H
bit Int_Key_IsDownP30();
...
#endif /* _INT_KEY_H */
// Int_Key.c
#include <STC89C5xRC.H> // 锟斤拷锟斤拷STC89C52锟斤拷头锟侥硷拷
#include "Com_Util.h"
bit Int_Key_IsDownP30(){
if (P30 == 0) {
Com_Util_Delay10ms();
if (P30 == 0) {
while (P30 == 0);
return 1; // 1: Key down, 0: Key up
}
}
return 0;
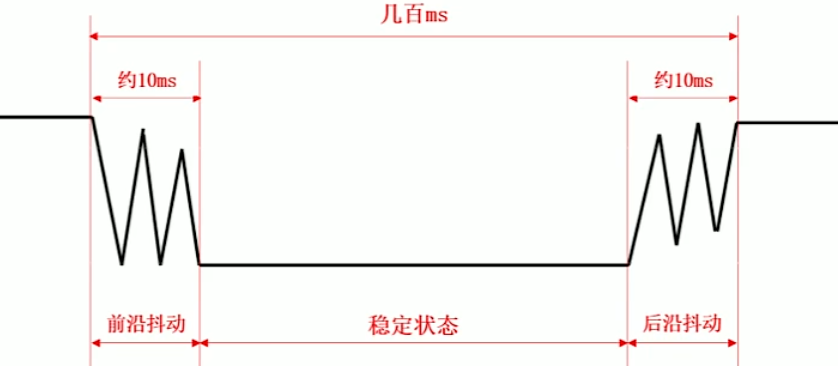
}消抖
- 问题
- 由按键的物理特性限制,按键内部弹簧和触电具有弹性,当按键被按下或释放是,弹性材料发生震动,从而导致触电在短时间内反复接触和断开,因此一次按键实际按下多次,从而看起来像“失灵”。
- 独立按键-在使用时,独立按键通过其中的金属弹片控制电路。在按下和抬起过程中,硬件接触之间不是瞬间完成的,存在抖动变化的过程。
延时消抖
// 利用延时10ms后的状态做判断依据,10ms后是低-表示按下-翻转led,10ms后是高-表示抬起-无需操作
void main()
{
do {
if (P31 == 0) {
Com_Util_Delay10ms();
if (P31 == 0) {
while (P31 == 0);
P20 = ~P20;
}
}
} while (1);
}

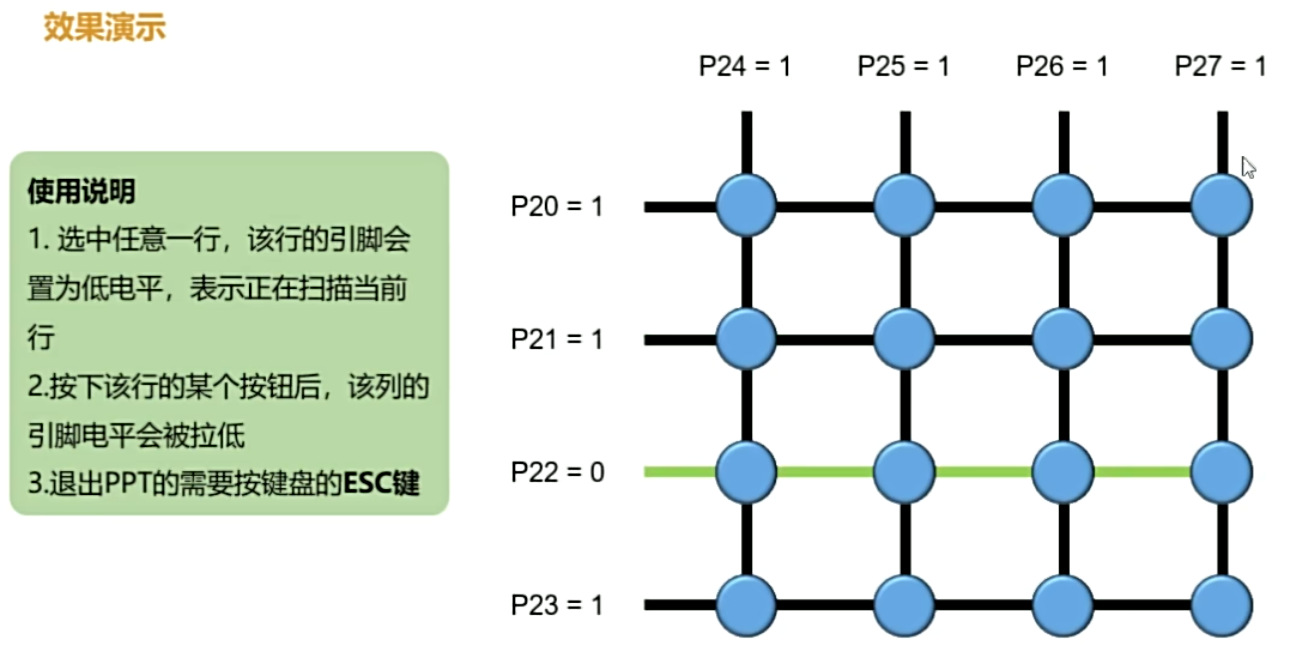
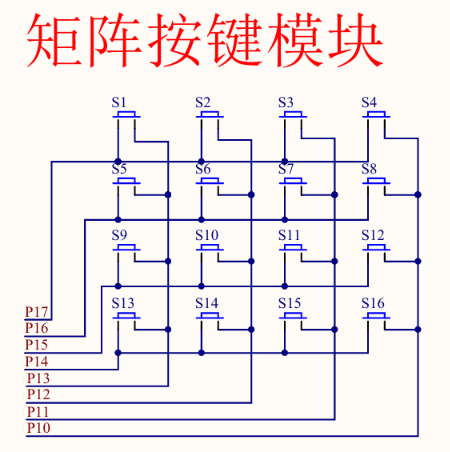
矩阵按键
思路:将P20引脚置0,分别获取 24、25、26、27谁为1表示被按下,再一次类推将21、22、23分别置0检测
// Int_KeyMatrix.c文件
#include "Int_KeyMatrix.h"
u8 Int_KeyMatrix_CheckSW()
{
u8 num1, num2;
int i;
num2 = 0;
for (i = 0; i < 4; i++) {
P1 |= 0xf0;
if (i == 0) P17 = 0;
if (i == 1) P16 = 0;
if (i == 2) P15 = 0;
if (i == 3) P14 = 0;
num1 = P1 & 0x0F; // 0000 1111
if (num1 == 0x0e) num2 = 4;
if (num1 == 0x0d) num2 = 3;
if (num1 == 0x0b) num2 = 2;
if (num1 == 0x07) num2 = 1;
if (num2) return (num2 + 4 * i);
}
return 0;
}
// main.c
#include <STC89C5xRC.H> // 包含STC89C52的头文件
#include <INTRINS.H>
#include "Int_KeyMatrix.h"
void main()
{
u8 key;
while (1) {
key = Int_KeyMatrix_CheckSW();
// 数码管展示指定数字
showNum(0, key % 10); // 个位
if(key / 10 % 10) showNum(1, key / 10 % 10); // 十位
}
}
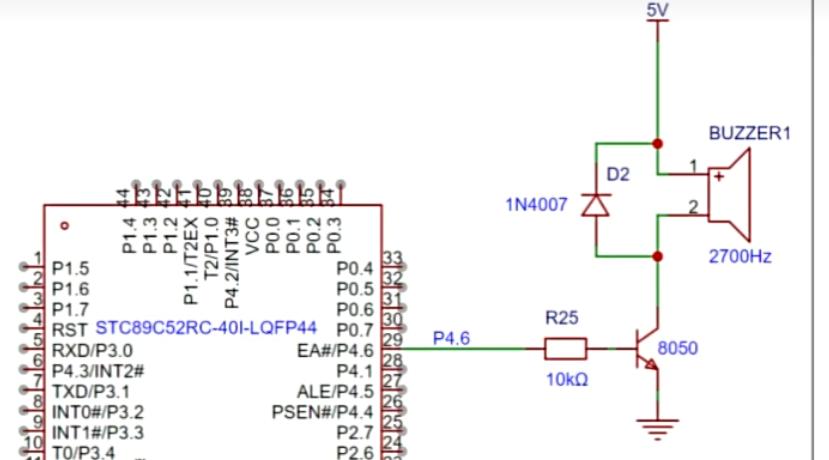
蜂鸣器
- 分类
- 有源蜂鸣器 - 自带震荡电路
- 震荡频率固定,声音固定
- 无源蜂鸣器 - 不自带震荡电路
- PWM可调节
- 有源蜂鸣器 - 自带震荡电路
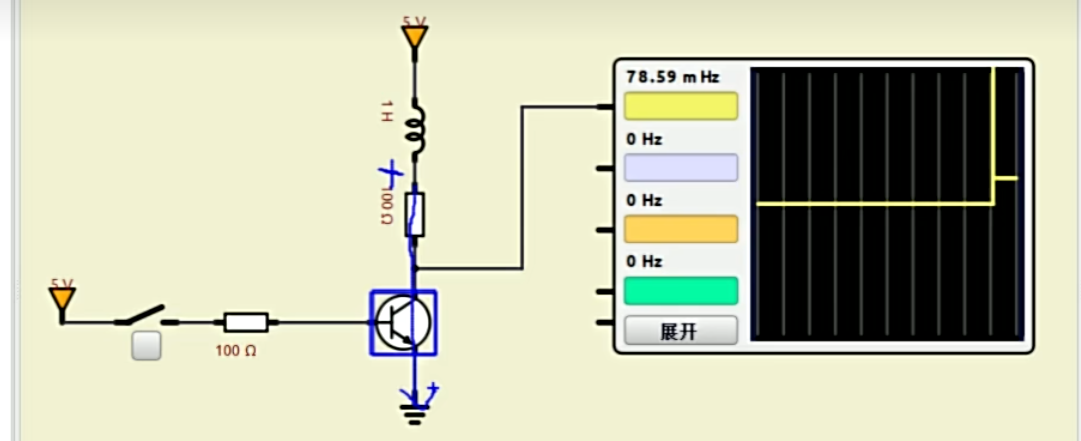
无源蜂鸣器
- 蜂鸣器旁边二极管的作用:释放断电时的瞬时高压,保护三极管防击穿!
// Int_Buzzer.c
#include <STC89C5xRC.H> // 包含STC89C52的头文件
#include "Int_Buzzer.h"
#include "Com_Util.h"
void Int_Buzzer_Buzz(void)
{
u8 count = 100;
while (count > 0) {
P25 = ~P25;
Com_Util_Delay1ms();
count -= 1;
}
}
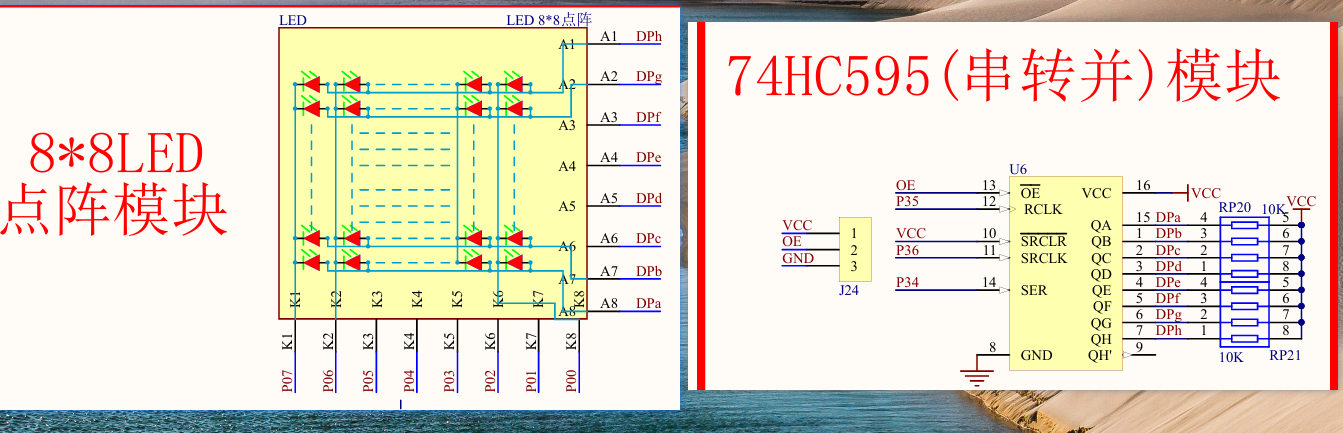
点阵LED
74HC238译码器
类似于
74HC138,与其相反,将3位二进制的输入转换为8位的二进制输出,同一时刻只有一个为高电平
74HC595
常用的 8位
串行输入 转 并行输出芯片
- SCK 移位寄存器 Shift Register
- 用于接收串行数据输入,芯片会根据SCK时钟信号(上升沿)将串行输入逐位移入移位寄存器
- RCK 存储寄存器 Stroage Register
- 与输出引脚相连,因此存储寄存器上的数据就是芯片的输出数据
- 会根据RCK时钟信号(上升沿),将移位寄存器接收的串行数据一次性加载到存储寄存器并进行输出
- 脚G非(OE)
- 74HC595开关,输出使能端,低电平开启,默认高电平
- SRCLR非
- 移位寄存器清零端,低电平有效,默认高电平
- QH`
- 串行数据输出脚,由于移位寄存器移入数据导致 被移除的数据
// demo - 未封装处理【略】
#include <STC89C5xRC.H> // 包含STC89C52的头文件
#include "Com_Util.h"
void main()
{
unsigned int temp;
int i;
do {
P36 = 0;
temp = 0x01;
for (i = 0; i < 8; i++) {
/* code */
P34 = 1; // 切换扫描行
// 触发移位+存储寄存器
P36 = ~P36;
P36 = ~P36;
P35 = ~P35;
P35 = ~P35;
// 设置要显示的灯光
P0 = 0x00;
// 设置延时
Com_Util_Delay1000ms();
}
} while (1);
}OLED模块
有机发光二极管,每一个像素点就是一个小的发光二极管,通过控制发光二极管的亮灭控制显示的内容。
- 按驱动方式分类
- PMOLED 被动矩阵
- 类似点阵LED,每次只能点亮一行或一列,需通过快速扫描显示内容
- AMOLED 主动矩阵
- 每个像素点都有独立的控制电路,可独立进行控制
- PMOLED 被动矩阵
驱动芯片
大多数的OLED显示屏都会带有 驱动芯片,用于控制每个像素点的亮灭显示图像和文字,此外还会提供数据接口如IIC、用于接收屏幕上要显示的数据
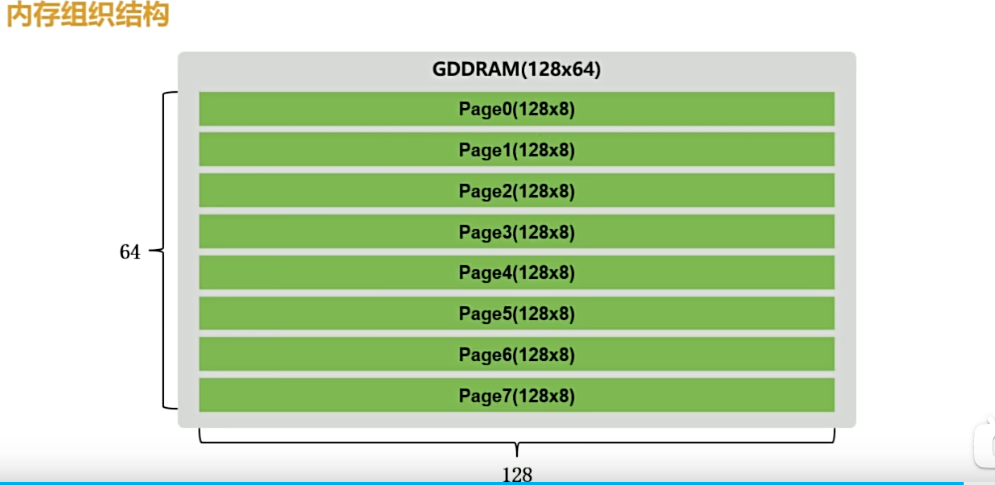
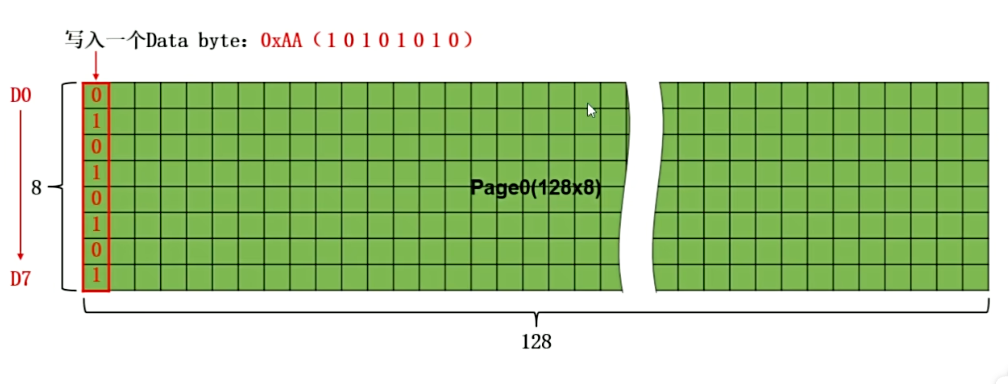
内存寻址
GGDRAM 将内部分为
共8页,128列/页,8bit/列 = 8*8*128所以控制时,应确定要写第几页(Page Address Pointer 页地址)的第几列(Column Address Pointer 列地址)
每成功写入一个字节后,Address Pointer 会自动递增
设置模式【省略设置寻址地址的命令-参考具体手册】
- 页寻址
- 用户须先向SSD 315发送控制命令设置页地址和设置列地址
- 之后可开始连续发送数据,成功写一个字节,列地址都会自动+1,页地址始终不变
- 如果写到当前页末尾,列地址会回到当前页的第1列
- 水平寻址
- 用户需先向SSD 315发送控制命令,设置一个写入区域:
- 分别指定页的起始地址和结束地址以及列的起始地址和结束地址
- 之后可开始连续发送数据成功写入一个字节,列地址都会自动+1
- 达到目标区域的右边界时,页地址自动+1;达到目标区域的右下角时,指针会再次回到左上角
- 用户需先向SSD 315发送控制命令,设置一个写入区域:
- 垂直寻址
- 与水平寻址类似,设置写入区域
- 从上到下、从左到右、顺序写入

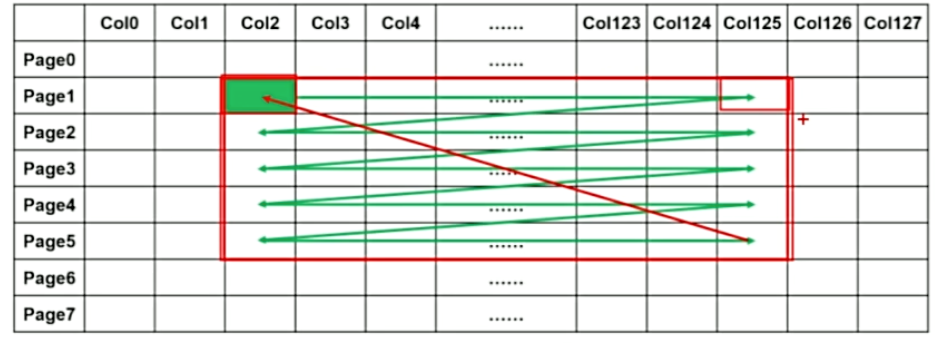
- 页寻址
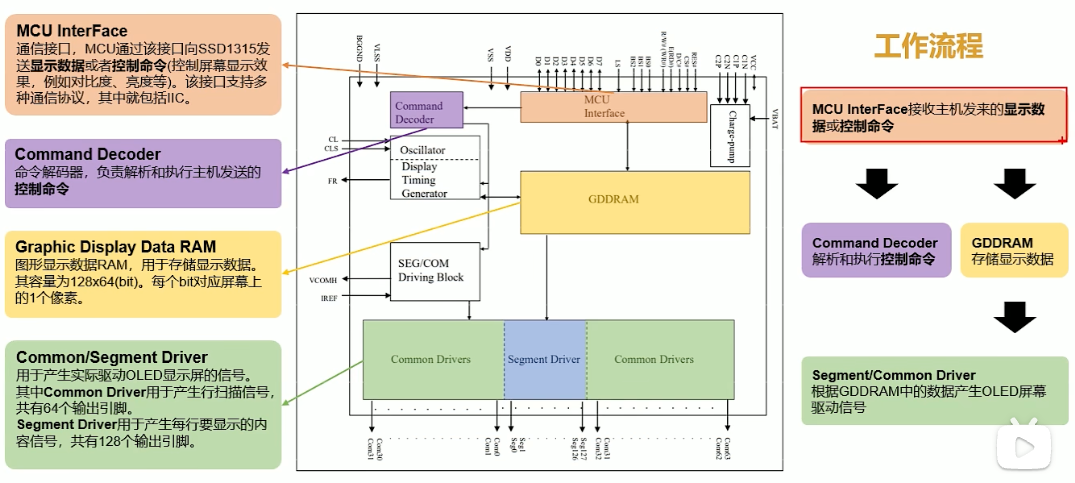
主要内容【参考下图】
MCU InterFace
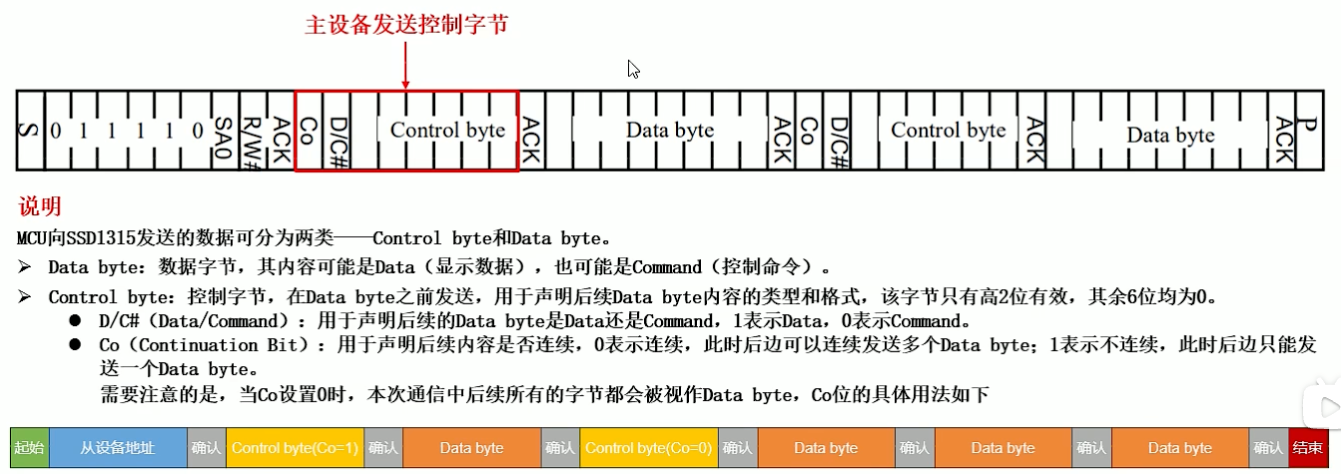
GDDRAM
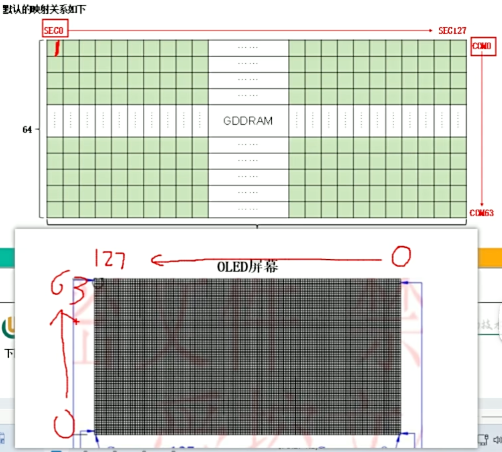
对应关系
- GDDRAM的bit字节 与 输入的引脚对应关系
- 输出引脚 与 OLED屏幕像素点对应关系
- 操作
- 默认的映射关系可能与 理想的位置并非一一对应
- 为保证设计的灵活性,SSD1315 提供 “重映射”功能,用户可通过命令重定义GDDRAM和输出引脚的对应关系
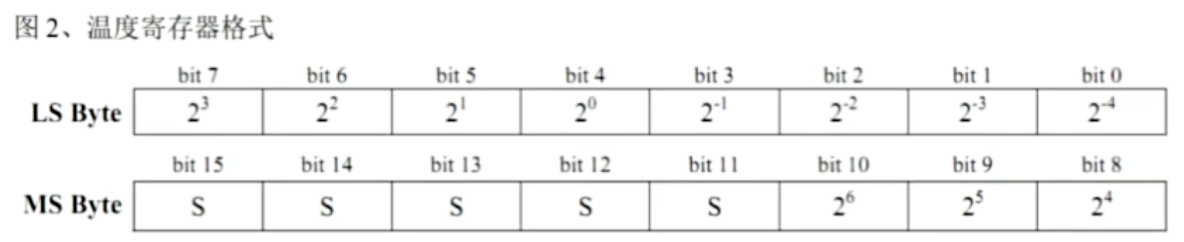
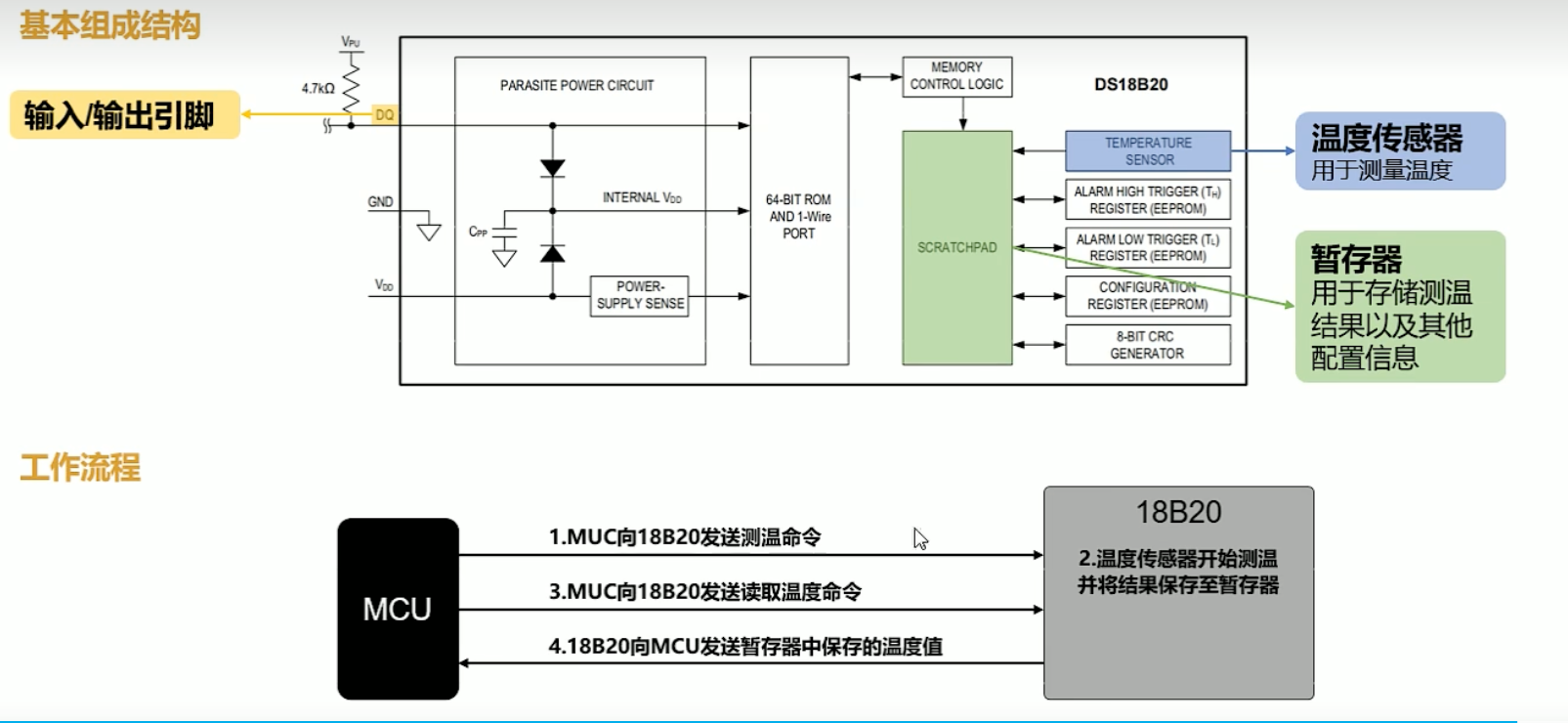
18B20温度
数字温度传感器,广泛用于环境监测、工业控制、家具自动化和设备温度监控等
采用 1-wire 总线进行通信,数据的输入输出仅靠一个DQ引脚完成
通信流程
复位脉冲:主设备发送复位脉冲,从设备回复存在脉冲
发送ROM命令:通过发送ROM命令,主设备可以获取总线上所有连接的18B20序列号,并根据序列号进行特定通信
- 搜索ROM命令 【0xF0】:识别和列出所有连接在总线上设备
- 读取ROM命令【0x33】:在单设备连接时,直接读取设备上的ROM代码
- 匹配ROM命令【0x55】:该命令后会跟随一个特定的64位ROM代码,选择特定设备通信
- 跳过ROM命令【0xCC】:在单设备环境中,跳过ROM步骤,直接与设备通信
发送功能命令
温度转换【44h】:启动温度测量将温度数据转换为数字信号,并存储在内部暂存器中,便于后续读取,18B20完成后自动恢复低功耗状态
读取暂存寄存器【BEh】:将返回暂存器中的所有数据,共9个字节,温度保存在前两个字节
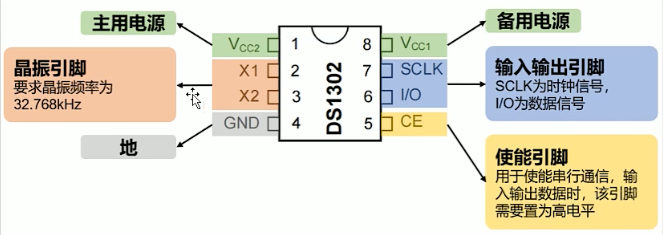
DS1302时钟
低功耗、实时时钟RTC 芯片