RTOS
软件工具
基础入门(FreeRTOS)
裸机与RTOS
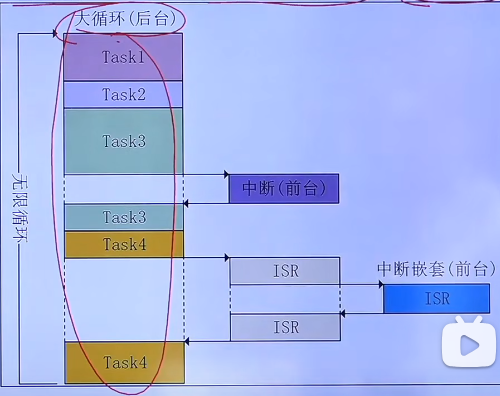
裸机【前后台系统】
前台系统:中断服务函数 ;后台系统:大循环、即应用程序
- 特点
- 时效性差,应用程序依次轮流执行
- delay 空等待,浪费cpu
- 结构臃肿,实现功能放在main中无限循环
- 特点
RTOS【实时操作系统】
- 特点
- 分而治之:实现功能划分为多个任务
- 延时函数:任务调度,让出CPU使用权,而不是空等待
- 抢占式:高优先级任务可抢占低优先级任务
- 任务堆栈:每个任务都有自己的栈空间【抢占与恢复】
- 中断可以打断任意任务【内核级】,任务都是【软件级】
- 任务之间可以同等优先级
- 特点
FreeRTOS™
- 特点
- 免费开源,无商业使用风险
- 可裁剪,核心代码9000+行,对硬件要求友好
- 简单,简单易用,可移植性非常好
- 优先级不限:任务优先级分配没有限制,多任务可同一优先级
- 优先级算法:通用软件方法,无限制
- 硬件方法:受限于MCU架构,例stm32属于32位,则优先级限制在0-31
- 数字越大,任务优先级越高(中断数字越小,任务优先级越高)
- 任务不限:可创建的实时任务没有软件限制,but分配堆栈受硬件限制
- 抢占/协程/时间片:支持抢占式、协成程、时间片流转任务调度
任务调度与状态
调度器使用相关的调度算法决定当前需要执行哪个任务
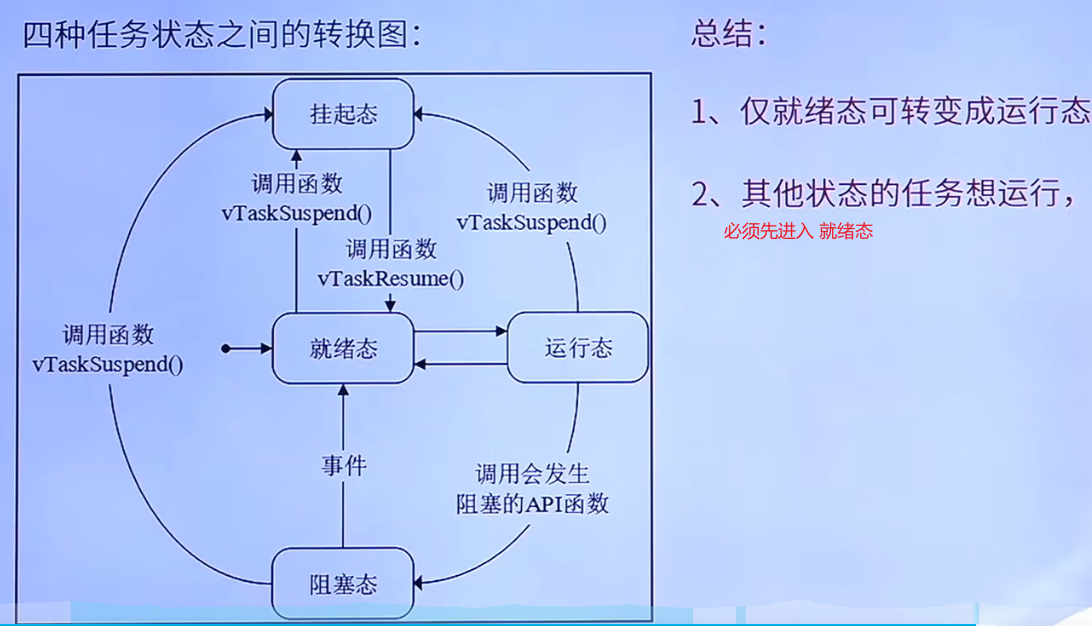
- 任务状态
- 运行态
- 就绪态:同等或更高优先级的任务正在执行,当前任务等待中
- 阻塞态:因外部延迟或等待外部事件发生,而等待
- 挂起态:类似暂停,调用函数
vTaskSusoend()进入挂起态,调用vTaskResume()解除挂起进入就绪态
- 任务列表【除就绪态外,其余三种状态都拥有任务列表-类似链表】
- 就绪列表
pxReadyTaskLists[x]x代表任务优先级值,常取硬件值范围。软件-无限制;硬件-0~31;- 挑选最高优先级任务进入运行态,相同优先级的任务会连接在同一就绪列表上轮流执行
- 32位的变量,当某个位,置一时,标识当前对应的优先级就绪列表有任务存在
- 阻塞列表
pxDelayedTaskList
- 挂起列表
xSuspendedTaskList
- 就绪列表
三种调度方式
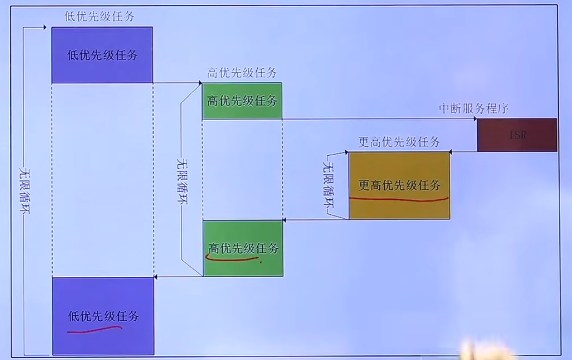
抢占式
- 针对优先级不同的任务,高优先级抢占低优先级任务【数值越大,优先级越大】
- 高优先级任务不停止,低优先级任务就无法被执行
- 被抢占的任务进入
就绪态
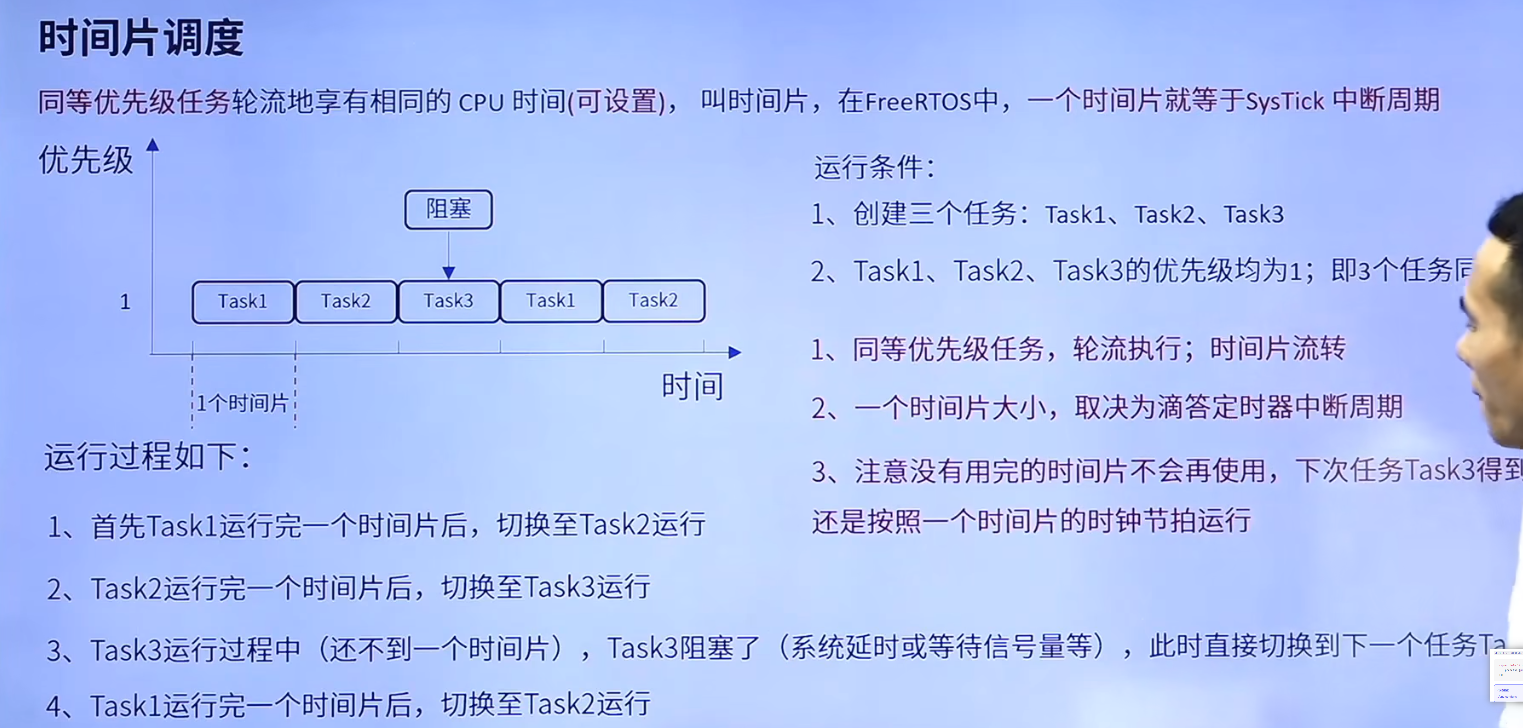
时间片
同等优先级任务轮流的享有CPU的时间(可设置中断周期),一个时间片就等于滴答定时器(SysTick)中断周期
- 针对优先级相同的任务,在每一次系统时钟节拍到达时切换任务,循环执行
- 当前任务意外阻塞后,会直接切换下个任务重新计时,而不是空等待
协成程【了解即可,FreeROTS不再更新,被淘汰?】
- 当前任务一直执行,高优先级也无法抢占,从前小芯片适合的方案

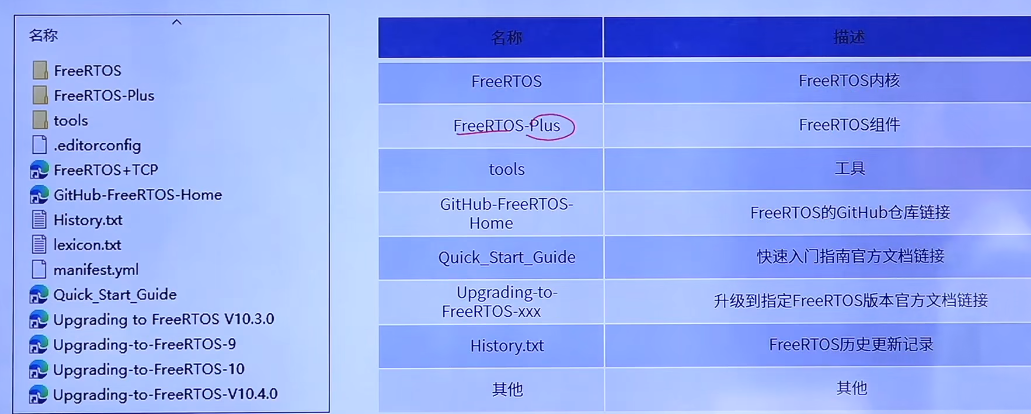
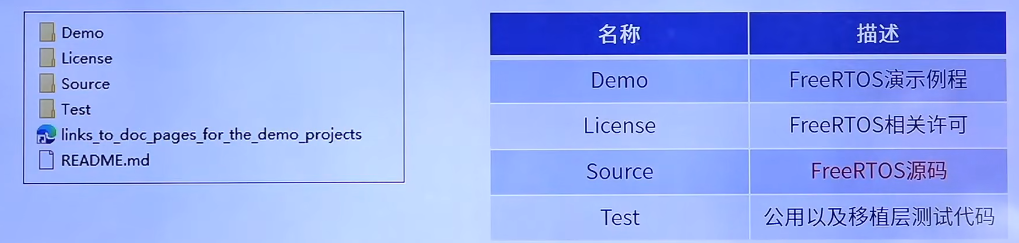
移植OS
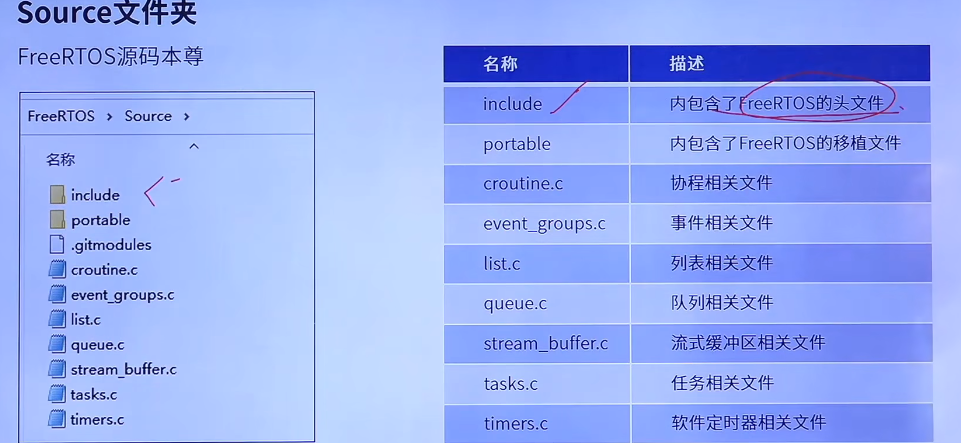
源码目录
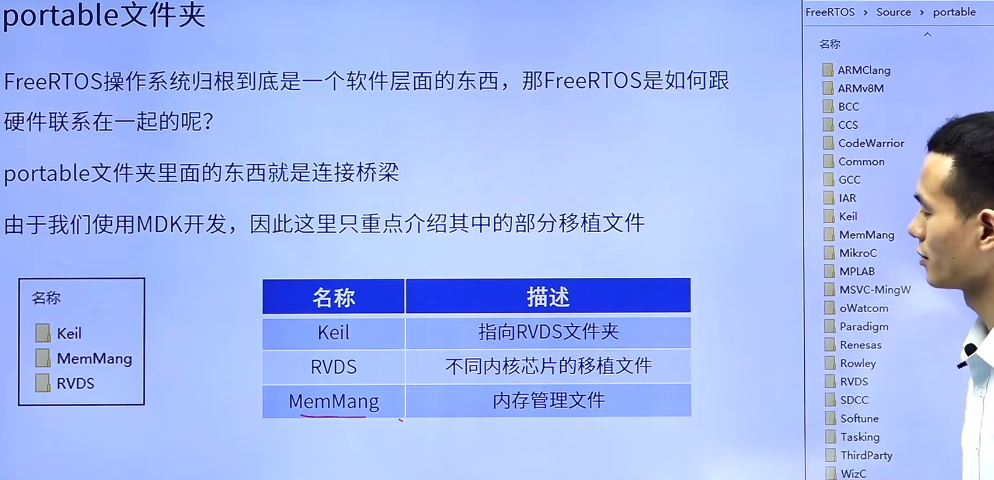
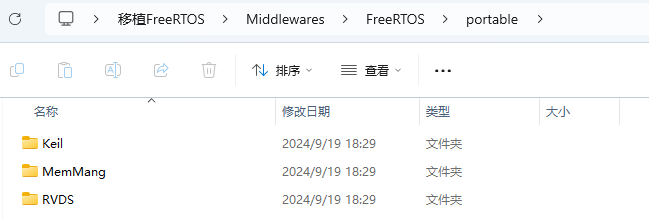
- FreeRTOS/Source/portable 的移植文件
- keil 指向 RVDS 文件夹
- RVDS 不同内核芯片的移植文件
- MemMang 内存管理文件
基础工程
后续需使用LED、LCD、定时器、内存管理等,可使用【HAL库版本的内存管理实验工程】作为基础工程进行FreeRTOS的移植
添加FreeRTOS源码 将源码添加到基础文件、头文件路径等
项目的 Middlewares下新建
FreeRTOS文件夹,并将源码部分拷贝进来精简 portable 文件内容
将文件添加到工程 keil打开项目 Projects/MDK_ARM/... 新建文件分组
Middlewares/FreeRTOS_CORE
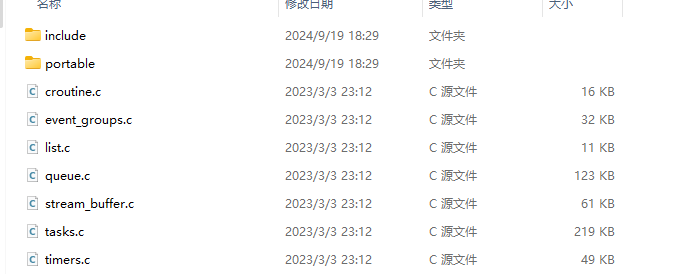
- 将下图1的所有.c文件加入
Middlewares/FreeRTOS_PORT
加入port.c
heap_4.c
开发板类型 所在文件夹 STM32F1 ARM_CM3 STM32F4 ARM_CM4F STM32F7 ARM_CM7/r0p1 STM32H7 ARM_CM7/r0p1
添加头文件路径
- 魔法笔 - c/c++ include path
- 选择 下图1的
include和 RVDS下的ARM_CM3
- 选择 下图1的
- 魔法笔 - c/c++ include path
添加 FreeRTOS Config.h 配置文件
操作系统的配置文件 宏定义,FreeRtOS可裁剪特性
- 获取途经
- 1:根据裁剪需求,自行编写
- 2:官方提供的demo文件夹的演示工程获取
- 3:正点原子教程获取
- 复制到项目的 user文件夹下
- 获取途经
修改SYSTEM文件中的
sys.c delay.c uart.c修改中断相关文件
Systick中断 SVC中断 PendSV中断添加应用程序
略
系统配置文件
- FreeRTOSConfig.js 配置文件:进行功能配置和裁剪,以及API函数的使能。
- https://www.freertos.org/zh-cn-cmn-s/Documentation/02-Kernel/03-Supported-devices/02-Customization
- 略
任务创建与删除
动态创建任务 xTaskCreate()
- 创建流程
- 将宏
configSUPPORT_DYNAMIC_ALLOCATION配置为 1 - 定义函数入口参数
- 编写任务函数
- 将宏
- 内部实现过程
- 申请堆栈内存 & 任务控制块(TCB)内存
- TCB结构体成员赋值 - 保存任务的信息
- 将新任务添加到就绪列表
查询任务栈历史剩余最小值
c// 动态创建任务函数 BaseType_t xTaskCreate{ TaskFunction_t pxTaskCode, /* 指向任务函数的指针 */ // const char * const 表示指针和常量都不能修改 const char * const pcName, /* 任务名字,最大长度 configMAX_TASK_NAME_LEN */ const configSTACK_DEPTH_TYPE usStackDepth, /* 任务堆栈大小,字为单位 1字==4字节 */ void * const pvParameters, /* 传递给任务函数的参数 */ UBaseType_t uxPriority, /* 任务优先级,范围 0 ~ configMAX_PRIORITIES-1 */ TaskHamdle_t * const pxCreatedTask, /* 任务句柄,任务的任务控制块 */ } // 返回值 pdPASS 任务创建成功 errCOULD_NOT_ALLOCATE_REQUIRED_MEMORY 任务创建失败 // 任务控制块TCB 结构体成员介绍 typedef struct tskTaskControlBlock{ // 任务栈顶与任务上下文保存、任务恢复息息相关 volatile StackType_t *pxTopOfStack; /* 任务栈栈顶,必须为TCB的第一个成员 */ ListItem_t xStateListItem; /* 任务状态列表项 */ ListItem_t xEventListItem; /* 任务事件列表项 */ UBaseType_t uxPriority; /* 任务优先级,数值越大,优先级越大 */ StackType_t * pxStack; /* 任务栈起始地址 */ char pcTaskName[ configMAX_TASK_NAME_LEN ]; /* 任务名字 */ ... // 省略条件编译成员 }- 创建流程
静态创建任务 xTaskCreateStatic()
- 创建流程
- 将宏
configSUPPORT_STATIC_ALLOCATION配置为 1 - 定义空闲任务 & [定时器任务] 的任务堆栈及TCB
- cpu不能停止,在空闲时需执行空闲任务
- 实现两个接口函数
vApplicationGetldleTaskMemory()必要,空闲任务内存赋值vApplicationGetTimerTaskMemory()可选,软件定时器内存赋值
- 定义函数入口参数
- 编写任务函数
- 将宏
- 内部实现
- TCB结构体成语赋值
- 添加新任务到就绪列表
c// 静态创建任务函数 BaseType_t xTaskCreate{ TaskFunction_t pxTaskCode, /* 指向任务函数的指针 */ const char * const pcName, /* 任务函数名 */ const uint32_t usStackDepth, /* 任务堆栈大小,字为单位 1字==4字节 */ void * const pvParameters, /* 传递给任务函数的参数 */ UBaseType_t uxPriority, /* 任务优先级,范围 0 ~ configMAX_PRIORITIES-1 */ StackType_t * const puxStackBuffer, /* 任务堆栈,一般为数组,由用户分配 */ StackType_t * const pxTaskBuffer, /* 任务控制块指针,由用户分配 */ } // 返回值 NULL 创建任务失败,用户没有提供相应的内存 其他值 任务句柄,任务创建成功- 创建流程
删除任务 vTaskDelete()
- 删除流程
- 使用删除任务函数,需将宏
INCLUDE_vTaskDelete配置为 1 - 入口参数输入需要删除的
任务句柄,NULL代表删除任务自身(当前正在执行的任务)
- 使用删除任务函数,需将宏
- 内部实现过程
- 获取要删除的任务控制块
- 将被删除任务,从其所在列表移除【就绪、阻塞、挂起、事件等列表】
- 判断所需删除的任务
- 删除自身,添加到等待删除列表,内存释放在空闲任务中执行
- 删除其他任务,任务释放,任务数量--
- 更新下个任务的阻塞时间
- 更新下一个任务的阻塞时间
- 注意
- 用于删除已被创建成功的任务
- 被删除的任务,将从 就绪任务列表、阻塞态任务列表、挂起态任务列表和事件列表执行中移除。
cvoid vTaskDelete( TaskHandle_t xTaskToDelete ); // xTaskToDelete 待删除任务的任务句柄- 删除流程
静态与动态区别
- 动态:
- 任务控制块及任务的栈空间所需内存,从FreeRTOS管理的堆栈中自动分配
- 删除函数传参
- NULL,空闲任务负责释放被删除任务中由系统自动分配的内存,运行中不能自杀
- 其它任务句柄,由删除任务函数直接释放内存
- 静态:
- 需用户分配提供内存
- 删除函数,由用户在删除任务前提前释放内存,否则将导致内存泄漏
- 形同点
- 创建的任务会立刻进入就绪态,由任务调度器调度运行
- 动态: